Этот
способ используют в приводе тех
механизмов, где установлены асинхронные
двигатели с фазным ротором. Например,
в приводе подъемно-транспортных машин.
В цепь фазного ротора вводится
регулировочный реостат. Увеличение
активного сопротивления ротора не
влияет на величину критического момента,
но увеличивает критическое скольжение
(рис. 2.21).
На
рис. 2.21 приведены механические
характеристики асинхронного двигателя
при разных сопротивлениях регулировочного
реостатаRр3>Rр2>0,Rр1=0.

Рис.
2.21
Как
следует из рис. 2.21 при этом способе можно
получить большой диапазон регулирования
частоты вращения в сторону понижения.
Основные недостатки этого способа:
Из-за
больших потерь на регулировочном
реостате снижается коэффициент полезного
действия, т.е. способ неэкономичный.
Механическая
характеристика асинхронного двигателя
с увеличением активного сопротивления
ротора становится мягче, т.е. снижается
устойчивость работы двигателя.
Невозможно
плавно регулировать частоту вращения.
Из-за
перечисленных недостатков этот способ
применяют для кратковременного снижения
частоты вращения.

Регулирование
частоты вращения асинхронных двигателей
Из
формулы ![]() следует,
следует,
что частоту вращения ротора асинхронного
двигателя можно регулировать следующими
способами: изменением частоты f1
питающего напряжения, числа пар
полюсов p и величины скольжения s.
Частотное
регулирование. Этот способ позволяет
плавно изменять частоту вращения в
широком диапазоне. Для его осуществления
требуется, чтобы двигатель получал
питание от отдельного источника (рисунок
2.18).
В
качестве такого источника в настоящее
время наиболее находят применение
полупроводниковые статические
преобразователи частоты.
В
зависимости от требований к механическим
характеристикам асинхронного двигателя
при частотном регулировании одновременно
с изменением частоты f1 приходится
по определенному закону изменять и
подводимое к обмотке статора напряжение U1.
Максимальный
момент двигателя приближенно (без учета
сопротивленияr1) определяется по (2.40),
![]() .
.
Учитывая,
что ![]() ,
, ![]() ,
, ![]() ,
,
получим
![]()
(2.54)
Если
при регулировании частоты вращения
требуется, чтобы при любой частоте f1
максимальный момент оставался неизменным
(регулирование с ![]() ),
),
то получим
![]() ,
,
(2.55)
откуда
следует, что для регулирования n2
при ![]() необходимо
необходимо
подводимое к обмотке статора напряжение U1
изменять пропорционально его частоте.
При этом основной магнитный поток машины при
различных значениях частоты f1 остается
неизменным, т.е.
![]()
(2.56)
Механические
характеристики асинхронного двигателя
при регулировании сMмакс = const показаны
на рисунке 2.19.
Недостатком
частотного регулирования является
относительно высокая стоимость
преобразовательных установок.
Регулирование
частоты вращения изменением числа пар
полюсов статорной обмотки. Для
осуществления данного регулирования
на статоре в общих пазах размещают не
одну, а две обмотки, имею-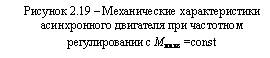
щие
различные шаги и, следовательно, различное
число пар полюсов. В зависимости от
необходимой частоты вращения в сеть
подключается та или иная обмотка. Этот
способ применяется сравнительно редко,
так как имеет существенный недостаток
– малое использование обмоточного провода (в
работе находится только одна из обмоток).
Значительно
чаще изменение числа пар полюсов
достигается изменением (переключением)
схемы соединений обмотки статора.
Принцип такого переключения показан
на рисунке 2.20.
При
переходе с последовательного соединения
двух катушек на параллельное число пар
полюсов изменяется с 2 на 1. При наличии
фазной обмотки на роторе, её также
необходимо переключать одновременно
с обмоткой статора, что является большим
недостатком. Поэтому данный способ
регулирования частоты вращения применяется
только у двигателей с короткозамкнутым
ротором.
Асинхронные
двигатели с переключением числа пар
полюсов называют многоскоростными. Они
выпускаются на две, три и четыре частоты
вращения. Известно большое число схем,
позволяющее осуществлять переключение
числа пар полюсов. Эти схемы разделяются
на схемы регулирования с постоянным
моментом и схемы регулирования с
постоянной мощностью. Механические
характеристики двухскоростных двигателей
показаны на рисунке 2.21.

Рисунок
2.20 – Изменение числа пар полюсов
переключением катушек обмотки:
а
– две пары полюсов; б – одна пара полюсов

Рисунок
2.21 – Механические характеристики
двухскоростного двигателя
с
переключением числа пар полюсов в
отношении 2:1
при
постоянном моменте (а) и при постоянной
мощности (б)
Из
всех способов регулирования частоты
вращения асинхронных двигателей способ
переключения числа пар полюсов является
наиболее экономичным, хотя и он имеет
недостатки:
–
двигатели
имеют относительно большие габариты и
массу по сравнению с двигателями
нормального исполнения;
–
регулирование
частоты вращения ступенчатое.
Многоскоростные
двигатели применяют для электропривода
станков и различных механизмов, частоту
вращения которых нужно регулировать в
широких пределах (например – лифтовые
асинхронные двигатели).
Регулирование
частоты вращения за счет изменения
питающего напряжения.
Отмеченное регулирование можно
осуществить посредством тиристорного
регулятора напряжения РН (рисунок 2.22).

Так
как вращающий момент асинхронного
двигателя пропорционален ![]() ,
,
то механические характеристики при
напряжениях, меньше номинального, пойдут
ниже естественной (рисунок 2.23).
Если
момент сопротивления MС остается
постоян-ным, то как следует из рисунка
2.23, при снижении напряжения сколь-жение
двигателя
увеличивается.
Частота вращения
ротора при этом уменьшается.
Регулирование
скольжения этим способом
возможно в пределах
0 < s < sкр.
Дальнейшее
снижение напряжения (ниже U1(2))
недопустимо, так как при этом Mмакс < MС
и двигательостановится.
Регулирование
частоты вращения двигателей изменением
подводимого напряжения U1 имеет
существенный недостаток: в этом случае
увеличиваются потери и, таким образом,
снижается КПД двигателя. При снижении
напряжения пропорционально U1
уменьшается основной магнитный
поток машины,
вследствие чего при M = MС =const
возрастают ток в обмотке ротора и,
следовательно, электрические потери в
роторе. Магнитные потери в стали статора
уменьшаются. Обычно при нагрузках
двигателей, близких к номинальной,
снижение U1 приводит к увеличению
суммарных потерь и повышению нагрева
двигателей. Поэтому рассматриваемый
способ регулирования частоты вращения
находит применение главным образом
для машин небольшой мощности.
Регулирование
частоты вращения асинхронных двигателей
путем включения в цепь ротора добавочного
активного сопротивления. Данный способ
регулирования применяется только в
двигателях с фазным ротором. Он позволяет
плавно изменять частоту вращения в
широких пределах (рисунок 2.24). Недостатками
его являются: большие потери энергии в
добавочных сопротивлениях, чрезмерно
«мягкая» механическая характеристика
двигателя при большом сопротивлении в
цепи ротора. В некоторых случаях последнее
является недопустимым, так как небольшому
изменению нагрузочного момента
соответствует существенное изменение
частоты вращения. На практике данный
способ применяется, главным образом,
для регулирования частоты вращения
небольших двигателей, например, в
подъемных устройствах.

При
данном способе регулирования частоты
вращения двигателя регулировочный
реостат (добавочное активное сопротивление),
включаемый в цепь ротора, должен быть
рассчитан на длительный режим работы.
Поэтому пусковые реостаты, рассчитанные
на кратковременное прохождение тока в
период пуска, не могут использоваться
как регулировочные.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Регулирование частоты вращения асинхронного двигателя изменением скольжения является одним из простых способов регулирования. В то же время при изменении (увеличении) скольжения в соответствии с формулами (32), (34) изменяются (увеличиваются) потери в обмотке ротора, что приводит к уменьшению КПД при регулировании. Регулирование скольжения можно осуществлять как со стороны статора, так и со стороны ротора. Естественно, что во втором случае ротор должен быть фазным и иметь выведенную на контактные кольца обмотку.
При регулировании со стороны статора изменяют приложенное к его обмотке напряжение. Увеличение напряжения сверх номинального приводит к насыщению магнитной цепи двигателя и потому не применяется. Для регулирования частоты вращения асинхронного двигателя уменьшают напряжение питания. При этом развиваемый двигателем момент изменяется пропорционально квадрату напряжения и соответственно изменяются механические характеристики двигателя (рис. 28,а), в результате чего изменяются и значения рабочих скольжений. Очевидно, что регулирование возможно в диапазоне изменения скольжения от 0 до sкр. Для получения достаточно большого диапазона изменения частоты вращения необходимо увеличивать sкр, т. е. применять двигатели с повышенным скольжением типа 4АС (рис. 28,б).
Рис. 28. Механические характеристики асинхронных двигателей при различных значениях первичного напряжения: а — двигатель нормального исполнения; б — двигатель с повышенным скольжением
Этот метод регулирования частоты вращения асинхронного двигателя применяется также для двигателей с фазным ротором, причем в этом случае в цепь ротора включаются добавочные сопротивления для увеличения sкр.
В связи с пониженным КПД и трудностями регулирования напряжения рассматриваемый метод применяется только для двигателей относительно малой мощности. При этом для регулирования U1 можно использовать регулируемые автотрансформаторы или резисторы, включенные последовательно в первичную цепь, а также реакторы насыщения, регулируемые путем подмагничивания постоянным током (магнитные усилители). При изменении постоянного тока подмагничивания индуктивное сопротивление реактора изменяется, что приводит к изменению напряжения на зажимах двигателя. Путем автоматического регулирования тока подмагничивания можно расширить зону регулирования частоты вращения в область s>sкр и получить при этом, жесткие механические характеристики.
Кроме магнитных усилителей применяются также управляемые и полууправляемые полупроводниковые регуляторы напряжения, также позволяющие в широком диапазоне регулировать приложенное напряжение и осуществлять автоматическое регулирование частоты вращения двигателя.
Частным случаем рассмотренного способа является импульсное регулирование частоты вращения, при котором асинхронный двигатель периодически подключается к сети и отключается от нее. При этом двигатель постоянно находится в переходном режиме ускорения (подключен к сети) или торможения (отключен от сети). Подбирая соотношение времени включения ко времени отсутствия питания, можно регулировать среднюю частоту вращения двигателя в широком диапазоне.
При регулировании со стороны ротора в основном применяется реостатное регулирование частоты вращения путем введения в цепь обмотки ротора добавочных активных сопротивлений (резисторов). При этом важно заметить, что изменение в широких пределах частоты вращения двигателя при данном способе регулирования не повлечет за собой изменения максимального (критического) момента Мmах (см. рис. 22). Таким образом, перегрузочная способность двигателя при регулировании не снижается.
Если асинхронный двигатель работает с некоторым приводимым механизмом на валу со статическим моментом сопротивления Мс (см. рис. 22), то на естественной характеристике установившемуся режиму его работы будет соответствовать точка 1. При введении добавочных сопротивлений — резисторов Rд1 — Rд3 — в цепь ротора произойдет соответствующий переход двигателя в новые режимы работы с меньшими частотами вращения: n1>n2>n3>n4. Характеристики двигателя по мере увеличения сопротивления резисторов в цепи ротора Rд становятся более мягкими. Наиболее жесткой характеристикой в данном случае будет естественная характеристика.
Работа двигателя на естественной характеристике в данном случае будет наиболее стабильной и устойчивой. Это означает, что при изменении момента сопротивления Мс в процессе работы производственного механизма отклонения частоты вращения двигателя будут минимальными.
Технические показатели данного способа регулирования следующие:
- диапазон регулирования сравнительно небольшой — порядка 2 : 1 и ограничивается вероятностью нестабильности работы двигателя при больших значениях сопротивлений резисторов Rд;
- плавность регулирования при реостатном регулировании небольшая и определяется числом ступеней регулирования. Переключение ступеней осуществляется, как правило, с помощью магнитных контроллеров, контакторов и реле.
Кроме реостатного регулирования применяется регулирование частоты вращения путем введения добавочной ЭДС в обмотку ротора асинхронного двигателя.
Регулирование частоты вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения Ps= sPэм, большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом КПД установки.
Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам ротора двигателя приемник электрической энергии в виде вспомогательной электрической машины. Эта машина должна работать в режиме двигателя, обеспечивая требуемое напряжение на своих зажимах (и соответственно на контактных кольцах самого асинхронного двигателя).
Поясним, как влияет на работу асинхронного двигателя введение добавочной ЭДС Eд в обмотку ротора, при условии, что частота Eд всегда равна частоте токов ротора f2 = sf1.
Пусть в отсутствие ЭДС Eд по цепи ротора протекает ток I2, определяемый в соответствии с формулой (25) как I2=sE2/(r2+jsx2). Этот ток, взаимодействуя с полем обмотки статора, создает электромагнитный момент М, численно равный моменту сопротивления нагрузки Мс, так что двигатель работает при некоторой частоте вращения n.
Если теперь во вторичную цепь ввести ЭДС Eд встречно ЭДС скольжения E2s в этой же цепи, то вторичный ток
 (56)
(56)
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s увеличиваться. При этом согласно равенству (56) ток I2, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов на валу: М=Мс. Двигатель при этом будет работать с увеличенным скольжением s. Очевидно, что регулированием Eд можно регулировать s и, следовательно, частоту вращения двигателя.
Предположим теперь, что ЭДС Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с ЭДС sE2. Тогда вместо (56) получаем
 (57)
(57)
В первый момент после введения ЭДС Eд ток I2 и момент М возрастут, асинхронный двигатель будет ускоряться и s будет уменьшаться. При достаточной величине Ед величина s уменьшится до нуля, и если ток I2, создаваемый в этом случае только за счет действия Eд, все еще будет велик по сравнению с током, необходимым для создания момента М=Mс, то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и ЭДС E2s при этом изменят знаки и будут расти по абсолютной величине до тех пор, пока в соответствии с выражением (57) ток не упадет до необходимой величины. При s<0 угол  отрицательный (см. векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
отрицательный (см. векторную диаграмму вторичной цепи двигателя, показанную на рис. 18). Ток I2 при этом будет иметь составляющую, совпадающую с потоком Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos φ двигателя повысится.
Таким образом, с помощью добавочной ЭДС Eд путем изменения ее значения и направления можно осуществить плавное двухзонное регулирование частоты вращения двигателя ниже и выше синхронной.
Реализация этого весьма экономичного способа регулирования частоты вращения сопряжена с усложнением схемы регулирования и требует применения электромеханического (электромашинного) или вентильного каскада для преобразования выделяемой при регулировании мощности потерь скольжения в полезную электрическую или механическую мощность. Каскадные установки выполняются на мощности до тысяч киловатт с диапазоном регулирования частоты вращения порядка 3 : 1.
Что нужно знать о скольжении асинхронного двигателя
Содержание
- 1 Устройство и принцип работы
- 2 Что такое скольжение АД
- 3 Зависимость режимов работы мотора от скольжения
- 4 Способы измерения
- 5 Видео по теме
Одним из основных электромоторов в мире является асинхронный двигатель. Чтобы его использовать в качестве привода, надо понимать, как поведет себя одна из главных переменных характеристик при пуске, изменении нагрузки на валу, колебании электронапряжения и частоты. Этот параметр называется скольжением электродвигателя.

Устройство и принцип работы
Двигатель переменного электротока, в котором скорость вращения ротора меньше скорости вращающегося электромагнитного поля статора, называется асинхронным.
Обмотки статора подключаются к сети синусоидального трехфазного электротока, после чего электромагнитный поток начинает вращаться и пересекает замкнутые токопроводящие витки подвижной части мотора. Под действием наведенной в них ЭДС возникает переменный электроток. Он создает свое магнитное поле, которое заставляет вращаться ротор с асинхронной скоростью следом за полем статора.

Статор представляет собой набранный из изолированных листов электротехнической стали корпус, в который различным способом уложены обмотки возбуждения. Ротор тоже шихтуется из изолированных листов. Они имеют пазы, в которых закрепляются штыри короткозамкнутого ротора или укладывается фазная обмотка. На концах вала ротора расположены подшипники, вставленные в торцевые крышки статора.

Короткозамкнутый ротор (его также называют «беличьей клеткой») состоит из набора стержней из алюминия или меди. По торцам они закольцованы вместе. Это наиболее простая и распространенная конструкция АД.

Мотор, ротор которого содержит 3-х фазную обмотку, называется фазным. Полноценные изолированные витки трех обмоток концами соединены вместе, а их начала выведены на контактные кольца. При помощи щеточного скользящего контакта катушки выведены на внешнее управление.

Что такое скольжение АД
Создание вращающегося магнитного поля (МП) в неподвижной части электрической машины происходит за счет разнесенных на 120 градусов по окружности корпуса витков 3-х катушек. Они образуют одну пару полюсов (p), на практике их может быть больше. Обмотки соединяются «треугольником» или «звездой». Запитываются они от трехфазной сети переменного электротока.
Электроток, сдвинутый по фазе на 120 градусов, протекая по размещенным по окружности виткам 3-х катушек, создает вращающееся МП с синхронной частотой:

Вращающееся МП, пересекая набор замкнутых токопроводящих витков подвижной части машины, создает в них ЭДС. Образовавшаяся в замкнутых рамках ротора электродвижущая сила способствует возникновению переменного электротока, воспроизводящего свое вращающееся электромагнитное поле.
Подвижная часть машины начинает вращаться вслед за вращающимся полем со скоростью n2 (об/мин), стремясь засинхронизировать свое электромагнитное поле с вращающимся полем неподвижной части, то есть, достичь скорости n1 (об/мин). Величина разницы скоростей в относительных единицах или процентах называется коэффициентом скольжения (S):

Асинхронная скорость n2 при нормальной эксплуатации электродвигателя всегда меньше синхронной скорости n1, поэтому скольжение асинхронного двигателя меньше единицы и ста процентов.

Зависимость режимов работы мотора от скольжения
Для АД скольжение рассматривается:
- В режиме холостого хода (ХХ);
- при номинальном значении нагрузки;
- генераторном применении;
- критической нагрузке;
- во время пуска.

Асинхронная скорость n2 в режиме ХХ при отсутствии нагрузки на валу практически равна синхронной скорости вращения электромагнитного поля статора n1. Скольжение в этом случае будет не более 3% и даже в режиме идеального ХХ (если пренебречь трением в подшипниках), оно не будет нулевым.
При номинальном напряжении и нагрузке скольжение S находится в диапазоне 2–8% для большинства моторов. Номинальная скорость или скольжение указываются на шильдике асинхронного двигателя. По ним строится график механической характеристики.
В генераторном режиме скольжение может быть отрицательным, то есть, меньше 0. Ротор в этом случае вращается под действием механической силы навстречу вращающемуся электромагнитному полю статора.
С увеличением нагрузки на валу мотора увеличивается момент торможения, вследствие чего увеличивается и скольжение. При этом растет электроток, наводимый в роторе, наряду с моментом вращения. При небольших нагрузках между моментом и скольжением наблюдается прямо пропорциональная зависимость. Но рост скольжения способствует возрастанию активных потерь в роторе, снижающих наводимый электроток. По этой причине момент увеличивается с меньшей скоростью, чем скольжение, а при определенном значении последнего момент становится максимальным и начинает снижаться. Скольжение, соответствующее максимальному моменту, называется критическим.
При пуске мотора асинхронная скорость равняется нулю, скольжение — единице, электроток в двигателе максимальный, а значение момента вращения вала выше значения момента торможения нагрузки. С увеличением скорости вращения МП ротора скольжение уменьшается, а когда скорость достигает своего номинального значения, устанавливается нормальный режим.

Из графика видно, что скольжение мотора меняется от 0 до 1. До того момента, пока не возникнет критическое скольжение, мотор работает устойчиво, а в промежутке от Sкр до 1 возникает неустойчивый режим, который зависит от характера и величины нагрузки на валу. Для управления в этом диапазоне применяют либо переключение «звезда-треугольник», либо фазный ротор, либо частотное регулирование.
Способы измерения
Измерение скольжения в двигателе должно осуществляться согласно требованиям ГОСТ 7217–89 с помощью амперметра постоянного тока, катушки индуктивности или стробоскопического эффекта.
Основная задача — подсчитать количество полных N отклонений стрелки от 0 за период времени T. После того, как нашли данный параметр, можно определить частоту электротока ротора:

Затем по соотношению частоты электротока статора и ротора следует найти скольжение:

Косвенными методами при использовании электромагнитной катушки или стробоскопического эффекта определяют количество оборотов ротора К за период времени Т (сек). Затем вычисляется скольжение. Для этого используется формула:

При больших значениях скольжения для измерения применяются тахогенераторы или тахометры, установленные на валу двигателя.