4.1. Классификация источников ошибок, характерных для спутниковых измерений
При отработке методов высокоточных спутниковых измерений возникает необходимость тщательного исследования влияний всех возможных источников ошибок выполняемых измерений, особенностей их проявления и обоснования методов их учета. В зависимости от характера воздействия отмеченных источников возникающие при этом ошибки подразделяются на две основные группы: систематические погрешности, которые применительно к спутниковым измерениям получили название смещений, и погрешности случайного характера, которые часто отождествляют с понятием «шум».
Для погрешностей первой группы разрабатываются специальные методы их учета. Влияние второй группы удается, в большинстве случаев, минимизировать за счет использования большого массива отдельных измерений. В настоящем разделе основное внимание уделено рассмотрению ошибок систематического характера, обусловливающих появление смещений результатов измерений. При их исследовании и создании методов ослабления их влияния широкое распространение получил метод моделирования, для разработки которого приходится тщательно изучать механизм воздействия таких источников ошибок на результаты измерений с тем, чтобы на основе такого изучения разработать эффективные методы минимизации отмеченного влияния.
Исходя из анализа измерительного процесса, характерного для систем GPS и ГЛОНАСС, все основные источники ошибок можно условно разбить на три основные группы:
1) ошибки, связанные с неточностью знания исходных данных, из которых определяющая роль принадлежит погрешностям знания эфемерид спутников, значения которых должны быть известны на момент измерений;
2) ошибки, обусловленные влиянием внешней среды, среди которых выделяют такие источники, как воздействие атмосферы (ионосферы и тропосферы) на результаты спутниковых измерений, а также отраженных от окружающих объектов радиосигналов (многопутность);
147
3) инструментальные источники ошибок, к которым, как правило, относят неточность знания положения фазового центра антенны приемника, неучтенные временные задержки при прохождении информационных сигналов через аппаратуру, а также погрешности, связанные с работой регистрирующих устройств спутниковых приемников.
Наряду с перечисленными выше группами ошибок приходится учитывать и отдельные факторы, обусловливающие появление ошибок, которые не характерны ни для одной из перечисленных выше групп. В частности, к таким ошибкам могут быть отнесены погрешности, возникающие вследствие неоптимального взаимного расположения наблюдаемых спутников (геометрический фактор). Кроме того, целый ряд ошибок может возникать в процессе перехода от одной координатной системы к другой. Например, от свойственной системе GPS глобальной координатной системы WGS-84 к местной, интересующей потребителя координатной системе.
В следующих подразделах в обобщенном виде проанализированы особенности влияния основных источников ошибок.
4.2. Источники ошибок, связанные с неточным знанием эфемерцд спутников, и методы ослабления их влияния
При нахождении интересующих потребителя координат точек на земной поверхности спутниковыми методами необходимо наряду с измерением расстояний до спутника знать также его эфемериды, которые определяют местоположение спутника на момент выполнения измерений. Как уже отмечалось в подразделе 2.1, неточность знания эфемерид обусловливает соответствующие погрешности определения как абсолютных значений координат определяемых точек, так и их разностей между пунктами наблюдений. Механизм неточного знания эфемерид связан, прежде всего, с наблюдаемыми на практике расхождениями между предсказываемой (невозмущенной) и реальной (подверженной влиянию возмущающих сил) орбитами. К возмущающим силам относят различные факторы как гравитационного, так и негравитационного происхождения. Влияние различных факторов на движение спутников типа GPS и ГЛОНАСС приведено в табл. 4.1 [70, 73].
Первые из них, обусловленные притяжением спутника со стороны Землй, Луны и Солнца, поддаются достаточно эффективному моделированию. В то же время такие возмущающие факторы негравитационного происхождения, как, например, солнечное радиационное давление, плохо поддаются моделированию из-за непредсказуемости отдельных компонент, от которых зависит результирующее воздействие на спутник отмеченного давления.
148
|
Таблица 4.1 |
||
|
Возмущающие |
Максимальное |
Максимальное |
|
факторы |
возмущающее |
возмущение за 1 час, м |
|
Центральное поле |
ускорение, м/с2 |
|
|
5,65-Ю’1 |
||
|
Земли |
— |
|
|
Вторая зональная |
||
|
гармоника |
5,3-Ю-5 |
300 |
|
Гравитация Луны |
5,5-10″6 |
40 |
|
Гравитация Солнца |
310-6 |
20 |
|
Четвертая зональная |
||
|
гармоника |
ю-7 |
0,6 |
|
Солнечная радиация |
ю-7 |
0,6 |
|
Гравитационные |
||
|
аномалии |
ю-8 |
0,06 |
|
Другие факторы |
ю-8 |
0,06 |
Проведенные к настоящему времени исследования по количественной оценке отдельных факторов на эфемериды спутника свидетельствуют о том, что наибольшее воздействие на уклонения реальной орбиты от расчетной оказывает гравитационное поле Земли. В частности, из-за влияния второго гармонического коэффициента С20 такие уклонения для трехчасовых дуг орбит достигают 2 км, а для более протяженных двухсуточных дуг до 14 км. С такими значительными уклонениями нельзя не считаться при любых видах спутниковых измерений.
Суммарное гравитационное влияние масс Луны и Солнца хотя и оказывается существенно меньшим (для трехчасовых дуг уклонения от невозмущенной орбиты оцениваются величинами на уровне от 50 до 150 м), но, тем не менее, при прогнозировании значений эфемерид данное влияние также следует учитывать.
Непосредственно с гравитацией связаны также наблюдаемые на земной поверхности различного рода приливные явления, которые из-за перераспределения масс приводят к изменениям в предрассчитываемом гравитационном поле Земли, а следовательно, и к влияниям на орбитальное движение спутника. Проведенная оценка такого влияния свидетельствует о том, что уклонения спутника от расчетной орбиты из-за воздействия данного фактора даже для двухсуточных дуг лежат в пределах от 0,5 до 2 м, и этим влиянием применительно к рассматриваемым спутникам можно пренебречь.
Переходя к оценке влияния факторов негравитационного происхождения, следует заметить, что наиболее существенное влияние на неточность знания эфемерид спутников, входящих в состав систем
149
GPS и ГЛОНАСС, оказывает солнечное радиационное давление. Как показывают предрасчеты, уклонения спутников от расчетной траектории из-за воздействия прямого солнечного радиационного давления лежат в пределах от 5-6 м (для трехчасовых дуг) до 100-800 м (для двухсуточных дуг). Отмеченные предрасчеты характеризуются невысокой надежностью по следующим причинам:
1)интенсивность солнечного излучения не остается постоянной
стечением времени;
2)модель влияния данного фактора существенно изменяется при переходе спутника в зону тени и полутени;
3)эффективная поверхность спутника плохо поддается предрасчету как из-за сложной конфигурации такой поверхности, так и из-за вариаций положения спутника в пространстве.
Дополнительную неопределенность в предрасчет влияния радиационного давления вносит отраженная от земной поверхности солнечная радиация, зависящая от атмосферных условий и отражающих свойств облучаемых Солнцем участков земной поверхности.
Другим возмущающим фактором негравитационного происхождения является атмосферное торможение. При оценке влияния этого фактора следует иметь в виду, что на характерной для рассматриваемых спутников высоте около 20 тыс.км атмосфера оказывается чрезвычайно разреженной, и ее влиянием при предрасчетах орбит спутников, как правило, пренебрегают.
Обобщая оценку суммарного влияния всех перечисленных выше возмущающих факторов, заметим, что эти данные используются только для первоначального приближенного предвычисления реальных орбит спутников. Что касается получения необходимых для наземных наблюдателей значений эфемерид спутников, то на практике применяют более эффективные экспериментальные методы, базирующиеся на использовании опорных станций, установленных на пунктах с известными координатами и выполняющих непрерывные высокоточные наблюдения спутников в автоматическом режиме. За счет использования таких станций слежения решается обратная задача, состоящая в том, что с помощью одновременных измерений с нескольких (не менее трех) станций производится периодическое последовательное определение эфемерид всех наблюдаемых спутников. После соответствующей обработки на центральной станции вычисляются поправки к ранее определенным значениям эфемерид, которые с помощью передающих загружающих станций систематически (три раза в сутки, а последнее время один раз в сутки) передаются на соответствующие спутники, где вводятся в состав навигационного сообщения. Последнее, как уже отмечалось ранее, сбрасывается со спутника потребителю
150
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
19.02.2021
Глава 4 — Источники ошибок ГНСС
В главе 2 мы представили концепцию источников ошибок ГНСС. Это факторы, которые затрудняют определение точного положения ГНСС приемника. В этой главе мы более подробно рассмотрим источники этих ошибок.
Таблица 13: Источники ошибок ГНСС

Источники ошибок
Спутниковые часы
Атомные часы на спутниках ГНСС очень точны, но они немного дрейфуют. К сожалению, небольшая неточность спутниковых часов приводит к значительной ошибке в определении приемником своего местоположения. Например, ошибка часов в 10(−6) сек приводит к ошибке положения в 3 м.
Часы на спутнике контролируются наземной системой управления ГНСС и сравниваются с еще более точными часами, используемыми в ней. В данных, передаваемых спутником пользователю, содержится оценка смещения бортовых часов. Обычно передаваемая точность составляет ± 2 м, хотя она может варьироваться в зависимости от разных систем ГНСС. Чтобы получить свое более точное местоположение, ГНСС приемник должен компенсировать ошибку часов.
Одним из способов компенсации погрешности часов является загрузка точной информации о часах спутника из систем дифференциальной коррекции (SBAS) или систем точного позиционирования (PPP). В передаваемой информации содержатся поправки за ошибки бортовых часов, которые были рассчитаны системами SBAS или PPP. Более подробные сведения о системах SBAS и PPP представлены в главе 5.
Другой способ компенсации погрешности часов — настроить приемник для работы в режиме дифференциальной коррекции или кинематики реального времени (RTK). В главе 5 также подробно рассматриваются дифференциальные методы ГНСС и RTK.
Ошибки эфемерид
Спутники ГНСС движутся по очень точным, хорошо известным орбитам. Однако, параметры орбиты немного меняются. Также, как и в случае с часами спутника, небольшое изменение орбиты приводит к значительной ошибке в вычисленном положении приемника.
Наземная система управления ГНСС постоянно отслеживает орбиты спутников. Когда орбита спутника изменяется, наземная система управления отправляет поправку на спутники, и эфемериды спутников обновляются. Даже с поправками, внесенными наземной системой управления ГНСС, все еще есть небольшие ошибки в параметрах орбиты, которые могут привести к ошибке местоположения до ± 2.5 м.
Одним из способов компенсации ошибок спутниковых орбит является загрузка точной эфемеридной информации из систем SBAS или PPP, которые будут более подробно рассматриваться в главе 5.
Другой способ компенсации ошибок спутниковой орбиты — использование приемника в режиме дифференциальной коррекции или RTK. Более подробная эта информация также представлена в главе 5.
Ионосферные задержки
Ионосфера — это слой атмосферы на высоте от 80 до 600 км над Землей. Этот слой содержит электрически заряженные частицы, называемые ионами. Эти ионы задерживают прохождение спутниковых сигналов и могут вызвать значительную ошибку определения местоположения спутника (обычно ± 5 м, но эта ошибка может возрастать в периоды высокой ионосферной активности, вызванной влиянием Солнца).
Ионосферная задержка зависит от солнечной активности, времени года, сезона, времени суток и места. В результате очень трудно предсказать, насколько ионосферная задержка повлияет на расчетное местоположение.
Ионосферная задержка также изменяется в зависимости от частоты радиосигнала, проходящего через ионосферу. ГНСС приемники, которые принимают более одной частоты, например L1 и L2, могут использовать это для повышения точности. Сравнивая измерения на L1 с измерениями на L2, приемник может определить величину ионосферной задержки и удалить эту ошибку из рассчитанных координат.
Для приемников, которые могут отслеживать только одну частоту ГНСС, используются модели ионосферы для уменьшения влияния ошибок, вызванных влиянием ионосферы. Из-за различного характера ионосферной задержки модели не так эффективны, как использование нескольких частот для их устранения.
Ионосферные условия очень похожи в пределах отдельной области, поэтому спутниковые сигналы, поступающие на приемники базовой станции и подвижные приемники, имеют очень похожую задержку. Это позволяет компенсировать ионосферную задержку дифференциальными методами ГНСС и RTK.
Тропосферные задержки
Тропосфера — это ближайший к поверхности Земли слой атмосферы.

Рис. 37
Вариации задержки в тропосфере вызываются изменением влажности, температуры и атмосферного давления.
Поскольку тропосферные условия в пределах отдельной зоны очень похожи, то базовая станция и приемники подвижного приемника испытывают очень похожее влияние тропосферы. Это позволяет дифференциальным методам ГНСС и RTK компенсировать тропосферную задержку.
Приемники ГНСС также могут использовать тропосферные модели для оценки количества ошибок, вызванных тропосферной задержкой.
Собственные шумы приемника
Шум приемника добавляет к ошибке положения величины, вызванные аппаратным и программным обеспечением. Приемники ГНСС высшего класса, как правило, имеют меньшие ошибки из-за собственного шума, чем более дешевые приемники.
Влияние многолучевости
Как показано на рис. 38 многолучевое распространение происходит, когда сигнал от спутника ГНСС отражается от объекта, например, стены здания, а затем приходит к антенне приемника. Поскольку отраженный сигнал распространяется дольше, то он поступает в приемник с небольшой задержкой. Этот задержанный сигнал может привести к тому, что приемник вычислит неправильное положение.

Рис. 38
Самый простой способ уменьшить ошибки из-за многолучевого распространения это разместить ГНСС антенну в месте, удаленном от отражающих поверхностей. Когда это невозможно, приемник и антенна ГНСС должны уметь обрабатывать многолучевые сигналы.
Ошибки многолучевого распространения с большой задержкой обычно обрабатываются ГНСС приемником, а ошибки сигнала с короткой задержкой отрабатываются антенной. Благодаря применению дополнительных технологий, высокопроизводительные приемники и ГНСС антенны, как правило, лучше устраняют ошибки многолучевости.
Заключение
В этой главе описаны источники ошибок, которые вызывают погрешности при расчете позиции. В главе 5 мы опишем методы, которые используют приемники ГНСС для уменьшения этих ошибок и получения более точного местоположения.
Материалы взяты с сайта компании NovAtel. Ссылка на первоисточник: https://novatel.com/an-introduction-to-gnss
Влияние атмосферы. К числу основных источников погрешностей спутниковых измерений относится неточное знание скорости радиосигнала на пути от спутника к приемнику. Наибольшее влияние на эту скорость оказывает состояние ионосферы – верхних слоев атмосферы, где газ содержит большое число свободных электронов и положительных ионов. Ионизация происходит в основном за счет энергии Солнца. Ионосфера окружает Землю в виде ионизированных слоев, расположенных на высотах от 60–90 до 500–1000 км.
В ионизированной среде показатель преломления для радиодиапазонов, используемых в системах GPS и ГЛОНАСС, зависит от частоты. При этом скорость распространения колебаний одной частоты (фазовая скорость) отличается от скорости распространения результирующей энергии колебаний нескольких близких частот (групповая скорость). Поэтому результаты фазовых и кодовых измерений искажаются различно.
Погрешности псевдорасстояний, вызванные влиянием ионосферы, характеризуются формулами:
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-35.jpg "inj_geo_2-35.jpg")
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-36.jpg "inj_geo_2-36.jpg")
где dion(ф) – погрешность результата фазовых измерений;
dion(к) – погрешность результата кодовых измерений;
NS — количество электронов в вертикальном столбе ионосферы сечением 1 м2;
n — угол наклона траектории сигнала.
Видим, что ошибки, вызванные ионосферной рефракцией, в фазовых и кодовых измерениях равны по величине, но противоположны по знаку. Измеренные кодовые псевдорасстояния оказываются длиннее, а фазовые – короче геометрических дальностей.
Величина ионосферных ошибок измеренных псевдорасстояний зависит от многих причин (солнечной активности, времени суток, места, направления трассы сигнала) и может иметь значения от 0,15 м до 50 м.
Ионосферные ошибки кодовых измерений уменьшают комбинированием результатов измерений на двух частотах, а в одночастотных приемниках — введением поправок.
Ионосферные ошибки фазовых измерений ослабляют, применяя метод относительных определений, изложенный в конце п. 10.2. Результаты одновременных фазовых измерений в двух пунктах сигнала одного и того же спутника содержат практически одинаковые погрешности, вызванные влиянием ионосферы. Поэтому разность результатов таких измерений от них практически свободна.
На распространение сигнала влияет также тропосферная рефракция, под которой понимают задержку радиосигналов в нейтральных слоях атмосферы — стратосфере и тропосфере, где показатель преломления радиоволн с частотами до 15 ГГц от частоты радиосигнала не зависит и потому одинаков для обеих несущих частот L1, L2 и кодовых сигналов. Погрешности кодовых и фазовых измерений, вызванные тропосферной рефракцией, характеризуются формулой
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-37.jpg "inj_geo_2-37.jpg")
где HP – высота приемника;
HT – высота нейтральной атмосферы;
Nт(h) – высотный профиль приведенного показателя преломления Nт (индекса рефракции).
Для расчета тропосферных ошибок пользуются различными аппроксимациями высотного профиля показателя преломления, к числу которых относится, в частности, экспоненциальная модель:
![]()
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-39.jpg "inj_geo_2-39.jpg")
где NP – значение индекса преломления на высоте приемника HP;
Nt – значение индекса преломления на высоте Ht – на границе тропо- и стратосферы.
При этом Ht = 9000 м; Nt = 105; ![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-40.jpg "inj_geo_2-40.jpg") ;
;
![]()
![]() м–1.
м–1.
Значение индекса преломления у земной поверхности зависит от метеорологических факторов и может быть вычислено по формуле
![]()
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-44.jpg "inj_geo_2-44.jpg") ,
,
где P – атмосферное давление, мбар;
Т – температура, К;
e – парциальное давление водяного пара, мбар.
Многопутность. В ряде случаев спутниковым приемником, кроме полезного прямого сигнала, могут быть приняты сигналы, отраженные земной поверхностью или близлежащими объектами (например, зданиями), а также сигналы, обогнувшие вследствие дифракции мелкие предметы. Многопутность приводит к искажению дальностей (рис. 10.3).
3
h
A
B
C
a
2
1
a
a
Рис. 10.3 Многопутность сигнала:
1 – прямой луч; 2 – луч, отраженный от земли;
3 – луч, отраженный от стены
Определим разность хода DR между отраженным от земной поверхности 2 и прямым 1 лучами. В точках А и В расстояние до ИСЗ одинаковы. Тогда
DR = AC – BC = AC (1 – cos2a) = 2 AC sin2a = 2 h sina, (10.3)
где h – высота установки антенны (обычно 1–2,5 м);
a – угол наклона радиолуча.
Анализ формулы (10.3) показывает, что установка антенны возможно ближе к земле позволяет уменьшить влияние сигналов, отраженных от земной поверхности. В предельном случае при h = 0 будем иметь DR = 0.
Меры по исключению влияния многопутности:
установка антенны в местах, где отсутствуют отражающие поверхности;
использование антенн, на которых установлены экраны, отсекающие отраженные от земной поверхности лучи.
11 НАЗЕМНЫЕ СЪЕМКИ МЕСТНОСТИ
11.1 Общие сведения о съемке местности
Топографической съемкой называется комплекс работ по созданию плана местности. План может быть составлен в графическом виде или с применением современных технологий – в цифровом виде как цифровая модель местности (ЦММ).
Различают съемки:
-
наземные, когда работы по сбору информации о местности выполняют на земной поверхности;
-
аэрокосмические, когда сбор информации выполняется с помощью приборов, находящихся на летательных аппаратах (самолетах, вертолетах, искусственных спутниках Земли и др.).
В зависимости от применяемых приборов среди наземных видов съемки различают: теодолитную, мензульную, тахеометрическую, стереофотограмметрическую (фототеодолитную) и сканерную. При этом фототеодолитные и сканерные съемки используют аппаратуру и методы, аналогичные применяемым в аэрокосмических съемках, поэтому они будут рассмотрены отдельно (см. разд. 13).
В ряде случаев выполняется съемка только контуров местных предметов (без отображения рельефа). Такую съемку называют горизонтальной, или контурной. Съемку только рельефа называют вертикальной.
При картографировании больших территорий основными являются аэрофототопографическая и космическая съемки. При выполнении работ под строительство различных объектов обычно применяют наземные виды съемки: тахеометрическую и теодолитную и реже – мензульную. Вид съемки выбирают с учетом экономических затрат на ее выполнение, площади снимаемого участка, наличия геодезических приборов, подготовленности исполнителей и др.
Наземная съемка местности включает создание съемочной сети, съемку подробностей, обработку результатов измерений с составлением плана местности.
Съемочная сеть – это совокупность закрепляемых на местности точек, положение которых в плане и по высоте определяют в принятой для съемки системе координат и высот.
Плановую съемочную сеть чаще всего создают в виде системы замкнутых и разомкнутых теодолитных ходов. В таких ходах длиной до 1,2 км относительные невязки не должны превышать 1:2000, а угловые невязки –![]() , где n – число углов в ходе. Съемочная сеть должна опираться не менее чем на два исходных пункта высшего класса.
, где n – число углов в ходе. Съемочная сеть должна опираться не менее чем на два исходных пункта высшего класса.
Высоты пунктов съемочной сети определяют, как правило, методом геометрического нивелирования. Сеть должна быть привязана не менее чем к двум реперам высшего класса. При этом невязки ходов (в миллиметрах) не должны превышать ![]() , где L – длина хода, км.
, где L – длина хода, км.
При съемке с сечением рельефа через 2 и 5 м, а также при съемке всхолмленной местности с сечением рельефа через 1 м высотное съемочное обоснование можно создавать методом тригонометрического нивелирования. В этом случае высотные невязки в ходах не должны превышать допуска 0,0004×![]() , где P – длина хода и n – число линий в ходе.
, где P – длина хода и n – число линий в ходе.
Для съемки небольших участков местности съемочная сеть может быть построена в местной системе координат и высот без привязки к пунктам высшего класса.
Часть пунктов съемочной сети (2-3 пункта на съемочный планшет) закрепляют на местности знаками долговременной сохранности — бетонными пилонами, заложенными в землю на глубину до 80 см. Остальные пункты закрепляют временными знаками — металлическими трубами, деревянными столбами, кольями.
Опираясь на пункты съемочной сети, выполняют съемку подробностей — контуров и рельефа местности. При съемке подробностей определяют положение съемочных пикетов – точек, расположенных в характерных местах контуров или рельефа. Нанеся пикеты на план, рисуют контуры местных предметов и горизонтали.
11.2 Теодолитная съемка
Теодолитной съемкой называют горизонтальную съемку, выполняемую с помощью теодолита и мерных приборов (лент, рулеток) или дальномера.
Теодолитную съемку выполняют для составления крупномасштабных контурных планов внутриквартальной застройки городов, населенных пунктов в сельской местности, внутризаводских территорий, железнодорожных станций, подъездных путей промышленных предприятий.
Съемочной основой теодолитной съемки служат, как правило, теодолитные ходы (замкнутые и разомкнутые). При необходимости сгущение съемочной сети может быть выполнено путем определения координат дополнительных точек засечками — полярной, линейной, угловой, опирающимися на пункты проложенных ранее теодолитных ходов.
Съемку ситуации выполняют путем измерений, связывающих положение характерных контурных точек объектов с пунктами съемочной основы. Наиболее распространены следующие способы съемки.
Способ прямоугольных координат обычно применяют при съемке объектов с четкими контурами. Так, при съемке здания (см. рис. 11.2, а) из каждой характерной точки его контура на сторону теодолитного хода опускают перпендикуляр и измеряют расстояние по стороне хода до основания перпендикуляра (координата x) и длину перпендикуляра (координата y). Расстояния измеряют рулеткой или лентой. Для контроля выполняют обмер здания.
б)
а)
4
1
2
3
2
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-48.jpg "inj_geo_2-48.jpg")
Рис. 11.1 Двухзеркальный экер:
а – вид прибора: 1, 2 – окна; 3, 4 – зеркала; б – ход лучей:
2 – пункт съемочной сети; Q – направление перпендикуляра
При построении перпендикуляров длиной более 8 м пользуются экером. Экер (рис. 11.1, а) имеет два зеркала 3 и 4, расположенных под углом d = 45°. Луч, падающий на одно из зеркал, после двойного отражения выходит под прямым углом g к исходному направлению. Действительно (см. рис. 11.1 б):
g = 180° — (w + e) = 180° — [(180° — 2a) + (180° — 2b)] = 180° — 360° + + 2×(a + b) = 180° — 2×[180° — (a + b)] = 180° — 2d.
Следовательно, при d = 45° имеем g = 90°.
Экер позволяет находить на стороне теодолитного хода 1–2 (см. рис. 11.2, а) точку, в которой линия хода и направление на съемочный пикет (угол здания) взаимно перпендикулярны. В этой точке в окне экера 2 (см. рис. 11.1, а) видна веха, установленная на пункте теодолитного хода, а под ней в зеркале – изображение угла здания.
в)
г)
б)
а)
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-49.jpg "inj_geo_2-49.jpg")
Рис. 11.2 Способы съемки ситуации:
а – прямоугольных координат; б – угловой засечки;
в – линейной засечки; г – полярных координат
Способ угловой засечки применяют при съемке удаленных или недоступных объектов. Так, для определения положения центра водонапорной башни (рис. 11.2, б) на пунктах съемочной сети 1 и 2 теодолитом измеряют горизонтальные углы b1 и b2. Наилучший угол g для засечки — 90°. Практически угол g должен быть в пределах от 30° до 150°.
Способ линейной засечки (рис. 11.2, в). Положение точки M определяют, измеряя расстояния до точек, положение которых известно. Способ удобен, когда расстояния не превышают длины применяемого мерного прибора.
Способ полярных координат (рис. 11.2, г). Для определения положения точки 1 измеряют горизонтальный угол b и расстояние d.
Результаты выполненных в ходе съемки измерений записывают в полевой журнал. Одновременно составляют абрис – схематический чертеж, на котором в произвольном масштабе показывают расположение пунктов съемочной сети и снимаемых объектов, характеристики снимаемых объектов и результаты измерений.
Составление плана выполняют в следующем порядке.
Вычисляют координаты пунктов съемочной основы (вершин теодолитных ходов и точек, полученных засечками).
Разбивают на планшете сетку прямоугольных координат и оцифровывают ее.
Наносят на план пункты съемочной сети.
Наносят на план съемочные пикеты и вычерчивают контуры.
Оформляют план в соответствии с руководством «Условные знаки».
11.3 Тахеометрическая съемка
Тахеометрической называют топографическую съемку местности, выполняемую с помощью тахеометров. Съемке подлежат и ситуация, и рельеф.
Тахеометром называют прибор, сочетающий теодолит – для измерения углов и дальномер – для измерения расстояний. Простейшим тахеометром является любой теодолит, снабженный нитяным дальномером.
Тахеометрическую съемку применяют при съемке в крупных масштабах небольших участков местности, особенно незастроенных или малозастроенных. Ее применяют также при съемке трасс существующих и проектируемых линейных сооружений (автомобильных и железных дорог, ЛЭП, трубопроводов и т. п.).
Съемочной основой тахеометрической съемки чаще всего служат теодолитно-высотные ходы – теодолитные ходы, в которых измеряют ещё и вертикальные углы, что позволяет методом тригонометрического нивелирования вычислить высоты пунктов хода.
Другой вид съемочной основы – теодолитно-нивелирные ходы – теодолитные ходы, в которых высоты пунктов определяют геометрическим нивелированием, ходы которого прокладывают по сторонам теодолитных ходов.
Применяют также тахеометрические ходы, в которых длины линий измеряют нитяным дальномером, а превышения — методом тригонометрического нивелирования.
Съемку ситуации и рельефа выполняют тахеометром, в основном способом полярных координат.
Для выполнения съемки тахеометр устанавливают на точке съемочной сети (на рис. 11.3, точка А), центрируют и горизонтируют. Измеряют высоту прибора k над центром пункта.
Ориентируют горизонтальный круг, то есть устанавливают его в такое положение, чтобы при трубе, направленной по стороне хода AB, отсчет по горизонтальному кругу был равен 0° 00¢.
Определяют место нуля М0 вертикального круга.
Реечник устанавливает рейку на пикете 1 (рис. 11.3). Наблюдатель наводит трубу прибора на рейку, читает по рейке высоту точки наведения l и берет отсчеты: по нитяному дальномеру (расстояние s1), по горизонтальному кругу (угол b1), по вертикальному кругу (отсчет Л (лево) или П (право)).
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-50.jpg "inj_geo_2-50.jpg")
Рис. 11.3 Абрис тахеометрической съемки
Помощник наблюдателя записывает результаты измерений в полевой журнал и составляет схематический чертеж снимаемого участка местности — абрис (см. рис. 11.3).
Реечник переносит рейку на следующие пикеты (2, 3, …), а наблюдатель вновь выполняет наведения и отсчеты.
Обработка результатов измерений, полученных теодолитом типа Т-30, выполняется по формулам:
— вычисление углов наклона v = Л — М0 (или v = М0 — П);
— вычисление горизонтальных расстояний d = s·cos2 ν,
— вычисление превышений h = ½ s·sin(2ν) + k – l
или h = d · tgν + k – l,
— вычисление высоты съемочных пикетов Нп = Hст + h,
где Hст – высота точки стояния прибора.
Составление плана местности включает:
– вычисление координат x, y и высот Н точек хода;
– разбивку на планшете сетки прямоугольных координат;
– нанесение на план точек хода по координатам x, y;
– нанесение точек и рисовку контуров, используя записи в журнале и абрис;
– рисовку горизонталей с заданной высотой сечения рельефа с использованием вычисленных высот точек и абриса;
– оформление плана в соответствии с указаниями руководства «Условные знаки».
Современные технологии
Использование электронных тахеометров (см. ч. I, разд. 8), регистрирующих результаты измерений на магнитные носители, и программных продуктов при обработке результатов измерений позволяет автоматизировать процесс составления плана.
При съемке местности электронный тахеометр устанавливают на точке съемочной основы, вводят в память координаты и высоту точки стояния, высоту прибора и отражателя, температуру воздуха и атмосферное давление. Наведя трубу на соседнюю точку хода, устанавливают отсчет по горизонтальному кругу, равный 0° 00¢.
Реечник ставит веху с отражателем поочередно на съемочных пикетах. Тахеометром измеряют горизонтальный и вертикальный углы и расстояние до отражателя. Горизонтальный угол и вычисленные по результатам измерений горизонтальное расстояние d, превышение h и высота пикета Нп высвечиваются на табло и регистрируются в памяти прибора. Предусмотрена возможность высвечивания и регистрации и иных данных.
Собранную информацию экспортируют в память компьютера и обрабатывают, используя такие пакеты программ, как «CREDO», «Топаз» и др. При этом получают электронную версию топографического плана. При необходимости ее можно распечатать на плоттере и получить план на бумаге.
Особенности крупномасштабной съемки железнодорожных
станций и узлов
Съемка железнодорожных станций и узлов выполняется в соответствии с ведомственными строительными нормами в масштабе 1:500 или 1:1000. Станции IV–V классов снимают работники дистанции пути, станции II–III классов – геодезическая группа отделения дороги, станции I класса и внеклассные — специализированные организации.
Планы станций можно составлять в государственной системе координат, но чаще применяют местную (станционную) систему, в которой за начало координат принимают точку пересечения оси пассажирского здания (ось x) с базисным ходом, проложенным вдоль главного пути (ось y). Система высот – обычно Балтийская.
Съемочной основой при съемке станций служат точки одного или нескольких базисных теодолитных ходов и опирающихся на них съемочных теодолитных ходов. Базисные ходы прокладывают вдоль главного пути или парка путей, съемочные – в местах, удобных для геодезических измерений и съемки путевого развития и пристанционной территории.
Базисные ходы привязывают в плане к пунктам геодезической сети ближайшего города (поселка), по высоте – не менее чем к двум реперам государственной нивелирной сети.
Точки ходов закрепляют как постоянными знаками, так и временными (дюбелями, деревянными колышками). Постоянными знаками должно быть закреплено не менее трех точек базисных ходов на каждый парк и не менее двух точек на 1 км главного пути.
Измерение углов и расстояний в ходах выполняют электронными тахеометрами или теодолитами Т2 или Т5 и светодальномерами, применяя трехштативную систему. Углы и длины линий измеряют двумя приемами. Невязки в ходах не должны превышать допусков, приведенных в табл. 11.1.
Высоты точек ходов определяют, прокладывая ходы технического или тригонометрического нивелирования.
Таблица 11.1
Допустимые невязки в ходах
|
Допустимые невязки |
Угловые |
Линейные |
Высотные |
|
Базисные и съемочные ходы на железнодорожных станциях |
|
1:4000 |
|
|
Съемочные ходы на станциях вне путевого развития, базисные ходы на разъездах |
|
1:2000 |
|
Съемку местных предметов выполняют в основном электронными тахеометрами, используя способы полярных и прямоугольных координат, реже — угловой засечки. Точность съемки — 0,2 мм в масштабе плана, но для элементов станционной ситуации и путевого развития она не должна превышать: вдоль путей – 6 см, поперек путей – 2 см.
В ходе съемки определяют координаты элементов путевого развития, углов пассажирского здания, локомотивного и вагонного депо, постов централизации, служебных и технических зданий, расположенных между путями или вблизи них, наружных граней опор искусственных сооружений, прожекторных мачт, мачт ЛЭП, высоких и низких платформ.
На стрелочных переводах выполняют их обмер. Определяют координаты центра стрелочного перевода, марку крестовины, тип рельсов, род балласта, способ управления и освещения.
При съемке производственных, служебно-технических и других зданий и сооружений определяют координаты не менее двух углов и выполняют обмер наружного периметра. Регистрируют наименование сооружения, состояние, принадлежность, материал стен, фундамента, кровли.
Геометрию станционных путей (прямые вставки, кривые, изломы) определяют по характерным точкам стрелочных переводов и точкам на осях путей через 40 м для планов масштаба 1:1000 и через 20 м для 1:500.
На каждом пикете измеряют междупутные расстояния и геометрическим нивелированием определяют отметки головок рельсов.
План составляют на листах малодеформируемого пластика (лавсана). При необходимости на план наносят углы съемочных планшетов и сетку координат. На плане показывают все элементы ситуации, в том числе — путевое развитие, искусственные сооружения, устройства наземных и подземных коммуникаций, здания, сооружения и пр. В пределах путевого развития железнодорожной станции, насыпей и выемок горизонтали не проводят.
Планы железнодорожных станций и узлов обновляют раз в 10 лет.
11.4 Мензульная съемка
Мензульная съемка – топографическая съемка местности, выполняемая с помощью мензулы и кипрегеля. Применяется при съемке в крупных масштабах небольших участков местности.
Комплект приборов для мензульной съемки включает мензулу, кипрегель, мензульную рейку, центрировочную вилку с нитяным отвесом и ориентир-буссоль.
Мензула (рис. 11.4) состоит из штатива, подставки и мензульной доски.
7
1
10
2
5
9
3
8
4
6
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-57.jpg "inj_geo_2-57.jpg")
Рис. 11.4 Мензула и кипрегель:
1 – штатив; 2 – подставка; 3 – мензульная доска;
4 – линейка кипрегеля; 5 – стойка; 6 – зрительная труба;
7 – уровень при вертикальном круге кипрегеля; 8 – уровень при линейке;
9 – центрировочная вилка; 10 – отвес
Кипрегель — прибор, предназначенный для прочерчивания направлений на планшете, определения превышений и расстояний. В настоящее время пользуются номограммным кипрегелем КН. В поле зрения трубы кипрегеля КН видны линии номограммы, которые при трубе, наведенной на рейку, позволяют отсчитать горизонтальное расстояние до рейки и превышение (см. рис. 11.6).
Подготовительные работы включают создание съемочной сети и подготовку планшета.
Съемочную сеть создают, прокладывая на участке съемки теодолитно-высотные или теодолитно-нивелирные ходы. При необходимости для сгущения сети определяют положение отдельных точек засечками, а в ходе съемки и графическими способами.
Для создания планшета используют лист пластика (лавсана) или бумаги, наклеенной на лист алюминия. На планшете с помощью линейки Дробышева вычерчивают координатную сетку, наносят по координатам пункты съемочной сети и подписывают их высоты. Планшет крепят на мензульной доске.
Установка мензулы на съемочной точке. Мензулу устанавливают на пункте съемочной сети и приводят ее в рабочее положение, выполняя следующие действия.
Мензулу центрируют, т. е. устанавливают в такое положение, чтобы изображение пункта сети на планшете было расположено на одной отвесной линии с центром пункта на местности (например, колышком). Центрирование выполняют с помощью центрировочной вилки 9 (см. рис. 11.4).
Мензулу ориентируют – поворачивают планшет так, чтобы направления на нем совпадали с соответствующими направлениями на местности. Так, для ориентирования планшета на пункте съемочной сети A (рис. 11.5) линейку кипрегеля прикладывают к линии ab, где a и b — изображения на планшете пунктов A и B. Затем поворачивают мензульную доску с планшетом так, чтобы веха, установленная на точке B, была видна в трубу кипрегеля в центре сетки нитей. Ориентирование проверяют, приложив линейку кипрегеля к изображению ac направления на другой пункт C.
В необжитых районах разрешается ориентировать мензулу по магнитному азимуту, используя ориентир-буссоль.
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-58.jpg "inj_geo_2-58.jpg")
Рис. 11.5 Ориентирование мензульного планшета:
A, B, C – закрепленные на местности точки;
a, b, c – их изображения на планшете
Мензулу горизонтируют, т. е. приводят плоскость планшета в горизонтальное положение. Для этого устанавливают линейку кипрегеля по направлению двух подъемных винтов подставки и, действуя ими, приводят пузырек уровня при линейке в нуль-пункт. Переставляют кипрегель, повернув на 90°, и третьим подъемным винтом приводят пузырек уровня в нуль-пункт.
Измеряют высоту прибора над центром пункта и устанавливают нуль мензульной рейки на высоте прибора.
Определяют место нуля вертикального круга.
Съемка ситуации и рельефа. Рейку устанавливают на точках (пикетах), расположенных в характерных местах контуров ситуации и рельефа.
Приложив линейку кипрегеля к изображению съемочной точки (на рис. 11.5 это точка a), наводят трубу на рейку и по номограммам кипрегеля отсчитывают горизонтальное расстояние d и превышение h. Вычисляют отметку пикета
Hп = Hст + h,
где Hст – отметка съемочной точки, то есть точки, на которой установлен кипрегель. Результаты измерений и вычислений записывают в журнал.
![[image]](https://injzashita.com/images/inj_geo_all/inj_geo_2-59.jpg "inj_geo_2-59.jpg")
Рис. 11.6 Поле зрения трубы кипрегеля КН:
отсчет горизонтального расстояния d = 14,7 м;
отсчет превышения h = +0,55 м
Горизонтальное расстояние d в масштабе составляемого плана откладывают вдоль скошенного края линейки кипрегеля и на планшете накалывают точку – изображение пикета. Рядом подписывают ее высоту H.
Одновременно с нанесением пикетов на планшете рисуют контуры местных предметов и, ориентируясь на отметки пикетов, проводят горизонтали.
Достоинством мензульной съемки является минимальный объем камеральных работ – план составляется в поле. Работа в полевых условиях позволяет сопоставить составляемый план с натурой и добиться наиболее полного соответствия плана и местности. С другой стороны, мензульная съемка не поддается автоматизации и очень зависит от погодных условий.
Слайд 1Основные источники ошибок спутниковых измерений и методы ослабления их
влияния

Слайд 2Основные факторы, влияющие на точность спутниковых определений:
1) ошибки, связанные
с неточностью знания исходных данных, из которых определяющая роль принадлежит
погрешностям знания эфемерид спутников;
2) влияние внешней среды;
3) инструментальные источники ошибок;
4) геометрический фактор, который определяет влияние на точность измерений взаимного расположения наблюдаемых спутников и приемников.
5) переход между системами координат, т.е. ошибки связанные с переходом от системы, в которой функционируют соответствующая система (GPS или ГЛОНАСС) к интересующей потребителя координатной системе.
 ошибки, связанные")
Слайд 3Влияние неточности положения спутника
Если принять
R20м
R 20 000
км
Эфемериды спутников — это таблицы содержащие координаты спутников на
определенные равноотстоящие моменты времени.

Слайд 4Влияние атмосферы на точность спутниковых измерений
Скорость света в
вакууме:
Скорость света в среде:
показатель преломления
индекс показателя преломления

Слайд 5Тропосфера и ионосфера
Тропосфера — нижний слой, расположенный над поверхностью
Земли, называют, высота которой 40-50 км.
Тропосферные задержки зависят от:
— атмосферного
давления;
— температуры;
— давления водяного пара.
Учитываются на основании физических моделей
Ионосфера — слой атмосферы от 60-90 км до 500-1000 км.
Подвержена сильному воздействию различных космических излучений, и, прежде всего, влиянию ультрафиолетовой радиации Солнца.
Ионосферные задержки зависят от концентрации свободных электронов и частоты колебаний.
Учитываются
на основании физических моделей и путем сравнения скоростей распространения радиосигналов на двух частотах.

Слайд 6Влияние тропосферной рефракции для средних условий (T=15°C) на измеряемые
расстояния, м
Влияние ионосферных задержек при измерении 1-й частоты, и остаточные
ошибки при измерении 2-х частот
 на измеряемые")
Слайд 8Геометрический фактор
DOP — Delution of Precision — понижение точности

Слайд 9Геометрический фактор
1) GDOP (геометрический фактор понижения точности с учетом
погрешности определения времени)
2) PDOP (фактор понижения точности трехмерного позиционирования)
 GDOP (геометрический фактор понижения точности с учетом")
Слайд 103) HDOP (фактор понижения точности двухмерного позиционирования)
4) VDOP
(фактор понижения точности в вертикальном направлении)
Геометрический фактор
 HDOP (фактор понижения точности двухмерного позиционирования) 4) VDOP")
Слайд 12Инструментальные источники ошибок
погрешность хода часов на спутнике и
в приемнике;
особенности работы передающей и приемной антенн;
временные задержки в аппаратуре
передатчика и приемника;
несовершенство работы отсчетных устройств, с помощью которых определяется время или фазовый сдвиг.


Artist’s conception of GPS Block II-F satellite in orbit
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
 C/A C/A
|
±6.7 |
| P(Y)
|
±6.0 |


Geometric Error Diagram Showing Typical Relation of Indicated Receiver Position, Intersection of Sphere Surfaces, and True Receiver Position in Terms of Pseudorange Errors, PDOP, and Numerical Errors
User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value,  , of about 1 meter (3 ft 3 in). The standard deviations,
, of about 1 meter (3 ft 3 in). The standard deviations,  , for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS’ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code’s accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.
, for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS’ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code’s accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.
The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,
 , is computed by multiplying PDOP (Position Dilution Of Precision) by
, is computed by multiplying PDOP (Position Dilution Of Precision) by
, the standard deviation of the user equivalent range errors.
is computed by taking the square root of the sum of the squares of the individual component standard deviations.
PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).
for the C/A code is given by:

The standard deviation of the error in estimated receiver position , again for the C/A code is given by:

The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width,  , or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.
, or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of  or about 30 centimeters.
or about 30 centimeters.
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective availability[edit]
GPS included a (currently disabled) feature called Selective Availability (SA) that adds intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
Theory of Relativity introduces several effects that need to be taken into account when dealing with precise time measurements. First, according to special relativity time passes differently for objects in relative motion. That is known as «kinetic» time dilation: in an inertial reference frame, the faster an object moves, the slower its time appears to pass
(as measured by the frame’s clocks). General relativity takes into account also the effects that gravity has on the passage of time. In the context of GPS the most prominent correction introduced by general relativity is gravitational time dilation: the clocks located deeper in the gravitational potential well (i.e. closer to the attracting body) appear to tick slower.
Satellite clocks are slowed by their orbital speed but sped up by their distance out of the Earth’s gravitational well.
Special Relativity (SR)[edit]
SR predicts that as the velocity of an object increases (in a given frame), it’s time slows down (as measured in that frame). For instance, the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary clocks by a factor of  where the orbital velocity is v = 4 km/s and c = the speed of light. The result is an error of about -7.2 μs/day in the satellite. The SR effect is due to the constant movement of GPS clocks relative to the Earth-centered, non-rotating approximately inertial reference frame. In short, the clocks on the satellites are slowed down by the velocity of the satellite. This time dilation effect has been measured and verified using the GPS.
where the orbital velocity is v = 4 km/s and c = the speed of light. The result is an error of about -7.2 μs/day in the satellite. The SR effect is due to the constant movement of GPS clocks relative to the Earth-centered, non-rotating approximately inertial reference frame. In short, the clocks on the satellites are slowed down by the velocity of the satellite. This time dilation effect has been measured and verified using the GPS.
General Relativity (GR)[edit]
SR allows to compare clocks only in a flat spacetime, which neglects gravitational effects on the passage of time. According to GR, the presence of gravitating bodies (like Earth) curves spacetime, which makes comparing clocks not as straightforward as in SR. However, one can often account for most of the discrepancy by the introduction of gravitational time dilation, the slowing down of time near gravitating bodies. In case of the GPS, the receivers are closer to Earth than the satellites, causing the locks at the altitude of the satellite to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development some believed that GPS would not be affected by GR effects, but the Hafele–Keating experiment showed it would be.
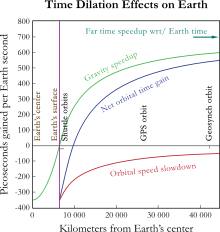
Combined kinetic and gravitational time dilations[edit]
Combined, these sources of time dilation cause the clocks on the satellites count extra +38 microseconds per day, compared to the clocks on the ground. This is a difference of 4.465 parts in 1010.[13] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[14] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
| Time dilation | Value | Notes |
|---|---|---|
| Kinetic | -7.2 μs/day | Clocks slowed in satellites due to Velocity |
| Gravitational | +45.8 μs/day | Clocks sped up in satellites due to higher altitude |
| Total (Combined) | +38.6 μs/day |
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[15] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[16] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[17]
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to satellite’s velocity and altitude, and add them together.
Kinetic time dilation[edit]
The amount due to velocity will be determined using the Lorentz transformation. The time measured by an object moving with velocity  changes by (the inverse of) the Lorentz factor:
changes by (the inverse of) the Lorentz factor:

For small values of v/c this approximates to:

The GPS satellites move at 3874 m/s relative to Earth’s center.[15] We thus determine:

This difference of 8.349×10−11 represents the fraction by which the satellites’ clocks tick slower than the stationary clocks. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks lose 7214 nanoseconds a day due to their velocity.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[18] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
Gravitational time dilation[edit]
The amount of dilation due to gravity will be determined using the gravitational time dilation equation:

where  is the time passed at a distance
is the time passed at a distance  from the center of the Earth and
from the center of the Earth and  is the time passed for a far away observer.
is the time passed for a far away observer.
For small values of  this approximates to:
this approximates to:

Determine the difference  between the satellite’s time
between the satellite’s time  and Earth time
and Earth time  :
:

Earth has a radius of 6,357 km (at the poles) making  = 6,357,000 m and the satellites have an altitude of 20,184 km[15] making their orbit radius
= 6,357,000 m and the satellites have an altitude of 20,184 km[15] making their orbit radius  = 26,541,000 m. Substituting these in the above equation, with Earth mass M = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:
= 26,541,000 m. Substituting these in the above equation, with Earth mass M = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:

This represents the fraction by which the clocks at satellites’ altitude tick faster than on the surface of the Earth. It is then multiplied by the number of nanoseconds in a day:

That is the satellites’ clocks gain 45850 nanoseconds a day due to gravitational time dilation.
Combined time dilation effects[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativity effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both time dilation effects.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[19]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[20] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[21] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[22] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[23] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[24]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[25] such as defrosters, or car window tinting films[26] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[27][28] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[29]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[30] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[31] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[32] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[33] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W.; «Real-World Relativity: The GPS Navigation System». Retrieved 25 January 2008.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).
Artist’s conception of GPS Block II-F satellite in orbit
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
Overview[edit]
| Source | Effect (m) |
|---|---|
| Signal arrival C/A | ±3 |
| Signal arrival P(Y) | ±0.3 |
| Ionospheric effects | ±5 |
| Ephemeris errors | ±2.5 |
| Satellite clock errors | ±2 |
| Multipath distortion | ±1 |
| Tropospheric effects | ±0.5 |
| C/A
|
±6.7 |
| P(Y)
|
±6.0 |
Geometric Error Diagram Showing Typical Relation of Indicated Receiver Position, Intersection of Sphere Surfaces, and True Receiver Position in Terms of Pseudorange Errors, PDOP, and Numerical Errors
User equivalent range errors (UERE) are shown in the table. There is also a numerical error with an estimated value, , of about 1 meter (3 ft 3 in). The standard deviations, , for the coarse/acquisition (C/A) and precise codes are also shown in the table. These standard deviations are computed by taking the square root of the sum of the squares of the individual components (i.e., RSS for root sum squares). To get the standard deviation of receiver position estimate, these range errors must be multiplied by the appropriate dilution of precision terms and then RSS’ed with the numerical error. Electronics errors are one of several accuracy-degrading effects outlined in the table above. When taken together, autonomous civilian GPS horizontal position fixes are typically accurate to about 15 meters (50 ft). These effects also reduce the more precise P(Y) code’s accuracy. However, the advancement of technology means that in the present, civilian GPS fixes under a clear view of the sky are on average accurate to about 5 meters (16 ft) horizontally.
The term user equivalent range error (UERE) refers to the error of a component in the distance from receiver to a satellite. These UERE errors are given as ± errors thereby implying that they are unbiased or zero mean errors. These UERE errors are therefore used in computing standard deviations. The standard deviation of the error in receiver position,
, is computed by multiplying PDOP (Position Dilution Of Precision) by
, the standard deviation of the user equivalent range errors.
is computed by taking the square root of the sum of the squares of the individual component standard deviations.
PDOP is computed as a function of receiver and satellite positions. A detailed description of how to calculate PDOP is given in the section Geometric dilution of precision computation (GDOP).
for the C/A code is given by:
The standard deviation of the error in estimated receiver position , again for the C/A code is given by:
The error diagram on the left shows the inter relationship of indicated receiver position, true receiver position, and the intersection of the four sphere surfaces.
Signal arrival time measurement[edit]
The position calculated by a GPS receiver requires the current time, the position of the satellite and the measured delay of the received signal. The position accuracy is primarily dependent on the satellite position and signal delay.
To measure the delay, the receiver compares the bit sequence received from the satellite with an internally generated version. By comparing the rising and trailing edges of the bit transitions, modern electronics can measure signal offset to within about one percent of a bit pulse width, , or approximately 10 nanoseconds for the C/A code. Since GPS signals propagate at the speed of light, this represents an error of about 3 meters.
This component of position accuracy can be improved by a factor of 10 using the higher-chiprate P(Y) signal. Assuming the same one percent of bit pulse width accuracy, the high-frequency P(Y) signal results in an accuracy of or about 30 centimeters.
Atmospheric effects[edit]
Inconsistencies of atmospheric conditions affect the speed of the GPS signals as they pass through the Earth’s atmosphere, especially the ionosphere. Correcting these errors is a significant challenge to improving GPS position accuracy. These effects are smallest when the satellite is directly overhead and become greater for satellites nearer the horizon since the path through the atmosphere is longer (see airmass). Once the receiver’s approximate location is known, a mathematical model can be used to estimate and compensate for these errors.
Ionospheric delay of a microwave signal depends on its frequency. It arises from ionized atmosphere (see Total electron content). This phenomenon is known as dispersion and can be calculated from measurements of delays for two or more frequency bands, allowing delays at other frequencies to be estimated.[1] Some military and expensive survey-grade civilian receivers calculate atmospheric dispersion from the different delays in the L1 and L2 frequencies, and apply a more precise correction. This can be done in civilian receivers without decrypting the P(Y) signal carried on L2, by tracking the carrier wave instead of the modulated code. To facilitate this on lower cost receivers, a new civilian code signal on L2, called L2C, was added to the Block IIR-M satellites, which was first launched in 2005. It allows a direct comparison of the L1 and L2 signals using the coded signal instead of the carrier wave.
The effects of the ionosphere generally change slowly, and can be averaged over time. Those for any particular geographical area can be easily calculated by comparing the GPS-measured position to a known surveyed location. This correction is also valid for other receivers in the same general location. Several systems send this information over radio or other links to allow L1-only receivers to make ionospheric corrections. The ionospheric data are transmitted via satellite in Satellite Based Augmentation Systems (SBAS) such as Wide Area Augmentation System (WAAS) (available in North America and Hawaii), EGNOS (Europe and Asia), Multi-functional Satellite Augmentation System (MSAS) (Japan), and GPS Aided Geo Augmented Navigation (GAGAN) (India) which transmits it on the GPS frequency using a special pseudo-random noise sequence (PRN), so only one receiver and antenna are required.
Humidity also causes a variable delay, resulting in errors similar to ionospheric delay, but occurring in the troposphere. This effect is more localized than ionospheric effects, changes more quickly and is not frequency dependent. These traits make precise measurement and compensation of humidity errors more difficult than ionospheric effects.[2]
The Atmospheric pressure can also change the signals reception delay, due to the dry gases present at the troposphere (78% N2, 21% O2, 0.9% Ar…). Its effect varies with local temperature and atmospheric pressure in quite a predictable manner using the laws of the ideal gases.[3]
Multipath effects[edit]
GPS signals can also be affected by multipath issues, where the radio signals reflect off surrounding terrain; buildings, canyon walls, hard ground, etc. These delayed signals cause measurement errors that are different for each type of GPS signal due to its dependency on the wavelength.[4]
A variety of techniques, most notably narrow correlator spacing, have been developed to mitigate multipath errors. For long delay multipath, the receiver itself can recognize the wayward signal and discard it. To address shorter delay multipath from the signal reflecting off the ground, specialized antennas (e.g., a choke ring antenna) may be used to reduce the signal power as received by the antenna. Short delay reflections are harder to filter out because they interfere with the true signal, causing effects almost indistinguishable from routine fluctuations in atmospheric delay.
Multipath effects are much less severe in moving vehicles. When the GPS antenna is moving, the false solutions using reflected signals quickly fail to converge and only the direct signals result in stable solutions.
Ephemeris and clock errors[edit]
While the ephemeris data is transmitted every 30 seconds, the information itself may be up to two hours old. Variability in solar radiation pressure[5] has an indirect effect on GPS accuracy due to its effect on ephemeris errors. If a fast time to first fix (TTFF) is needed, it is possible to upload a valid ephemeris to a receiver, and in addition to setting the time, a position fix can be obtained in under ten seconds. It is feasible to put such ephemeris data on the web so it can be loaded into mobile GPS devices.[6] See also Assisted GPS.
The satellites’ atomic clocks experience noise and clock drift errors. The navigation message contains corrections for these errors and estimates of the accuracy of the atomic clock. However, they are based on observations and may not indicate the clock’s current state.
These problems tend to be very small, but may add up to a few meters (tens of feet) of inaccuracy.[7]
For very precise positioning (e.g., in geodesy), these effects can be eliminated by differential GPS: the simultaneous use of two or more receivers at several survey points. In the 1990s when receivers were quite expensive, some methods of quasi-differential GPS were developed, using only one receiver but reoccupation of measuring points. At the TU Vienna the method was named qGPS and post processing software was developed.[citation needed]
Dilution of precision [edit]
Selective availability[edit]
GPS included a (currently disabled) feature called Selective Availability (SA) that adds intentional, time varying errors of up to 100 meters (328 ft) to the publicly available navigation signals. This was intended to deny an enemy the use of civilian GPS receivers for precision weapon guidance.
SA errors are actually pseudorandom, generated by a cryptographic algorithm from a classified seed key available only to authorized users (the U.S. military, its allies and a few other users, mostly government) with a special military GPS receiver. Mere possession of the receiver is insufficient; it still needs the tightly controlled daily key.
Before it was turned off on May 2, 2000, typical SA errors were about 50 m (164 ft) horizontally and about 100 m (328 ft) vertically.[8] Because SA affects every GPS receiver in a given area almost equally, a fixed station with an accurately known position can measure the SA error values and transmit them to the local GPS receivers so they may correct their position fixes. This is called Differential GPS or DGPS. DGPS also corrects for several other important sources of GPS errors, particularly ionospheric delay, so it continues to be widely used even though SA has been turned off. The ineffectiveness of SA in the face of widely available DGPS was a common argument for turning off SA, and this was finally done by order of President Clinton in 2000.[9]
DGPS services are widely available from both commercial and government sources. The latter include WAAS and the U.S. Coast Guard’s network of LF marine navigation beacons. The accuracy of the corrections depends on the distance between the user and the DGPS receiver. As the distance increases, the errors at the two sites will not correlate as well, resulting in less precise differential corrections.
During the 1990–91 Gulf War, the shortage of military GPS units caused many troops and their families to buy readily available civilian units. Selective Availability significantly impeded the U.S. military’s own battlefield use of these GPS, so the military made the decision to turn it off for the duration of the war.
In the 1990s, the FAA started pressuring the military to turn off SA permanently. This would save the FAA millions of dollars every year in maintenance of their own radio navigation systems. The amount of error added was «set to zero»[10] at midnight on May 1, 2000 following an announcement by U.S. President Bill Clinton, allowing users access to the error-free L1 signal. Per the directive, the induced error of SA was changed to add no error to the public signals (C/A code). Clinton’s executive order required SA to be set to zero by 2006; it happened in 2000 once the U.S. military developed a new system that provides the ability to deny GPS (and other navigation services) to hostile forces in a specific area of crisis without affecting the rest of the world or its own military systems.[10]
On 19 September 2007, the United States Department of Defense announced that future GPS III satellites will not be capable of implementing SA,[11] eventually making the policy permanent.[12]
Anti-spoofing[edit]
Another restriction on GPS, antispoofing, remains on. This encrypts the P-code so that it cannot be mimicked by a transmitter sending false information. Few civilian receivers have ever used the P-code, and the accuracy attainable with the public C/A code was much better than originally expected (especially with DGPS), so much so that the antispoof policy has relatively little effect on most civilian users. Turning off antispoof would primarily benefit surveyors and some scientists who need extremely precise positions for experiments such as tracking tectonic plate motion.
Relativity[edit]
Theory of Relativity introduces several effects that need to be taken into account when dealing with precise time measurements. First, according to special relativity time passes differently for objects in relative motion. That is known as «kinetic» time dilation: in an inertial reference frame, the faster an object moves, the slower its time appears to pass
(as measured by the frame’s clocks). General relativity takes into account also the effects that gravity has on the passage of time. In the context of GPS the most prominent correction introduced by general relativity is gravitational time dilation: the clocks located deeper in the gravitational potential well (i.e. closer to the attracting body) appear to tick slower.
Satellite clocks are slowed by their orbital speed but sped up by their distance out of the Earth’s gravitational well.
Special Relativity (SR)[edit]
SR predicts that as the velocity of an object increases (in a given frame), it’s time slows down (as measured in that frame). For instance, the frequency of the atomic clocks moving at GPS orbital speeds will tick more slowly than stationary clocks by a factor of where the orbital velocity is v = 4 km/s and c = the speed of light. The result is an error of about -7.2 μs/day in the satellite. The SR effect is due to the constant movement of GPS clocks relative to the Earth-centered, non-rotating approximately inertial reference frame. In short, the clocks on the satellites are slowed down by the velocity of the satellite. This time dilation effect has been measured and verified using the GPS.
General Relativity (GR)[edit]
SR allows to compare clocks only in a flat spacetime, which neglects gravitational effects on the passage of time. According to GR, the presence of gravitating bodies (like Earth) curves spacetime, which makes comparing clocks not as straightforward as in SR. However, one can often account for most of the discrepancy by the introduction of gravitational time dilation, the slowing down of time near gravitating bodies. In case of the GPS, the receivers are closer to Earth than the satellites, causing the locks at the altitude of the satellite to be faster by a factor of 5×10−10, or about +45.8 μs/day. This gravitational frequency shift is measurable. During early development some believed that GPS would not be affected by GR effects, but the Hafele–Keating experiment showed it would be.
Combined kinetic and gravitational time dilations[edit]
Combined, these sources of time dilation cause the clocks on the satellites count extra +38 microseconds per day, compared to the clocks on the ground. This is a difference of 4.465 parts in 1010.[13] Without correction, errors of roughly 11.4 km/day would accumulate in the position.[14] This initial pseudorange error is corrected in the process of solving the navigation equations. In addition, the elliptical, rather than perfectly circular, satellite orbits cause the time dilation and gravitational frequency shift effects to vary with time. This eccentricity effect causes the clock rate difference between a GPS satellite and a receiver to increase or decrease depending on the altitude of the satellite.
| Time dilation | Value | Notes |
|---|---|---|
| Kinetic | -7.2 μs/day | Clocks slowed in satellites due to Velocity |
| Gravitational | +45.8 μs/day | Clocks sped up in satellites due to higher altitude |
| Total (Combined) | +38.6 μs/day |
To compensate for the discrepancy, the frequency standard on board each satellite is given a rate offset prior to launch, making it run slightly slower than the desired frequency on Earth; specifically, at 10.22999999543 MHz instead of 10.23 MHz.[15] Since the atomic clocks on board the GPS satellites are precisely tuned, it makes the system a practical engineering application of the scientific theory of relativity in a real-world environment.[16] Placing atomic clocks on artificial satellites to test Einstein’s general theory was proposed by Friedwardt Winterberg in 1955.[17]
Calculations[edit]
To calculate the amount of daily time dilation experienced by GPS satellites relative to Earth we need to separately determine the amounts due to satellite’s velocity and altitude, and add them together.
Kinetic time dilation[edit]
The amount due to velocity will be determined using the Lorentz transformation. The time measured by an object moving with velocity changes by (the inverse of) the Lorentz factor:
For small values of v/c this approximates to:
The GPS satellites move at 3874 m/s relative to Earth’s center.[15] We thus determine:
This difference of 8.349×10−11 represents the fraction by which the satellites’ clocks tick slower than the stationary clocks. It is then multiplied by the number of nanoseconds in a day:
That is the satellites’ clocks lose 7214 nanoseconds a day due to their velocity.
- Note that this speed of 3874 m/s is measured relative to Earth’s center rather than its surface where the GPS receivers (and users) are. This is because Earth’s equipotential makes net time dilation equal across its geodesic surface.[18] That is, the combination of Special and General effects make the net time dilation at the equator equal to that of the poles, which in turn are at rest relative to the center. Hence we use the center as a reference point to represent the entire surface.
Gravitational time dilation[edit]
The amount of dilation due to gravity will be determined using the gravitational time dilation equation:
where is the time passed at a distance from the center of the Earth and is the time passed for a far away observer.
For small values of this approximates to:
Determine the difference between the satellite’s time and Earth time :
Earth has a radius of 6,357 km (at the poles) making = 6,357,000 m and the satellites have an altitude of 20,184 km[15] making their orbit radius = 26,541,000 m. Substituting these in the above equation, with Earth mass M = 5.974×1024, G = 6.674×10−11, and c = 2.998×108 (all in SI units), gives:
This represents the fraction by which the clocks at satellites’ altitude tick faster than on the surface of the Earth. It is then multiplied by the number of nanoseconds in a day:
That is the satellites’ clocks gain 45850 nanoseconds a day due to gravitational time dilation.
Combined time dilation effects[edit]
These effects are added together to give (rounded to 10 ns):
- 45850 – 7210 = 38640 ns
Hence the satellites’ clocks gain approximately 38,640 nanoseconds a day or 38.6 μs per day due to relativity effects in total.
In order to compensate for this gain, a GPS clock’s frequency needs to be slowed by the fraction:
- 5.307×10−10 – 8.349×10−11 = 4.472×10−10
This fraction is subtracted from 1 and multiplied by the pre-adjusted clock frequency of 10.23 MHz:
- (1 – 4.472×10−10) × 10.23 = 10.22999999543
That is we need to slow the clocks down from 10.23 MHz to 10.22999999543 MHz in order to negate both time dilation effects.
Sagnac distortion[edit]
GPS observation processing must also compensate for the Sagnac effect. The GPS time scale is defined in an inertial system but observations are processed in an Earth-centered, Earth-fixed (co-rotating) system. A coordinate transformation is thus applied to convert from the inertial system to the ECEF system. The resulting signal run time correction has opposite algebraic signs for satellites in the Eastern and Western celestial hemispheres. Ignoring this effect will produce an east–west error on the order of hundreds of nanoseconds, or tens of meters in position.[19]
Natural sources of interference[edit]
Since GPS signals at terrestrial receivers tend to be relatively weak, natural radio signals or scattering of the GPS signals can desensitize the receiver, making acquiring and tracking the satellite signals difficult or impossible.
Space weather degrades GPS operation in two ways, direct interference by solar radio burst noise in the same frequency band[20] or by scattering of the GPS radio signal in ionospheric irregularities referred to as scintillation.[21] Both forms of degradation follow the 11 year solar cycle and are a maximum at sunspot maximum although they can occur at any time. Solar radio bursts are associated with solar flares and coronal mass ejections (CMEs)[22] and their impact can affect reception over the half of the Earth facing the sun. Scintillation occurs most frequently at tropical latitudes where it is a night time phenomenon. It occurs less frequently at high latitudes or mid-latitudes where magnetic storms can lead to scintillation.[23] In addition to producing scintillation, magnetic storms can produce strong ionospheric gradients that degrade the accuracy of SBAS systems.[24]
Artificial sources of interference[edit]
In automotive GPS receivers, metallic features in windshields,[25] such as defrosters, or car window tinting films[26] can act as a Faraday cage, degrading reception just inside the car.
Man-made EMI (electromagnetic interference) can also disrupt or jam GPS signals. In one well-documented case it was impossible to receive GPS signals in the entire harbor of Moss Landing, California due to unintentional jamming caused by malfunctioning TV antenna preamplifiers.[27][28] Intentional jamming is also possible. Generally, stronger signals can interfere with GPS receivers when they are within radio range or line of sight. In 2002 a detailed description of how to build a short-range GPS L1 C/A jammer was published in the online magazine Phrack.[29]
The U.S. government reported that such jammers were used occasionally during the War in Afghanistan, and the U.S. military destroyed six GPS jammers during the Iraq War, including one that was destroyed with a GPS-guided bomb, noting the ineffectiveness of the jammers used in that situation.[30] A GPS jammer is relatively easy to detect and locate, making it an attractive target for anti-radiation missiles. The UK Ministry of Defence tested a jamming system in the UK’s West Country on 7 and 8 June 2007.[citation needed]
Some countries allow the use of GPS repeaters to allow the reception of GPS signals indoors and in obscured locations; while in other countries these are prohibited as the retransmitted signals can cause multi-path interference to other GPS receivers that receive data from both GPS satellites and the repeater. In the UK Ofcom now permits the use of GPS/GNSS Repeaters[31] under a ‘light licensing’ regime.
Due to the potential for both natural and man-made noise, numerous techniques continue to be developed to deal with the interference. The first is to not rely on GPS as a sole source. According to John Ruley, «IFR pilots should have a fallback plan in case of a GPS malfunction».[32] Receiver Autonomous Integrity Monitoring (RAIM) is a feature included in some receivers, designed to provide a warning to the user if jamming or another problem is detected. The U.S. military has also deployed since 2004 their Selective Availability / Anti-Spoofing Module (SAASM) in the Defense Advanced GPS Receiver (DAGR).[33] In demonstration videos the DAGR was shown to detect jamming and maintain its lock on the encrypted GPS signals during interference which caused civilian receivers to lose lock.
See also[edit]
- GPS augmentation
Notes[edit]
- ^ The same principle, and the math behind it, can be found in descriptions of pulsar timing by astronomers.
- ^ Navipedia: Troposphere Monitoring
- ^ Navipedia: Tropospheric Delay
- ^ Navipedia: Multipath
- ^ «IPN Progress Report 42-159 (2004)» (PDF).
- ^ SNT080408. «Ephemeris Server Example». Tdc.co.uk. Archived from the original on January 12, 2009. Retrieved 2009-10-13.
- ^ «Unit 1 – Introduction to GPS». Archived from the original on April 29, 2009.
- ^ Grewal (2001), p. 103.
- ^ «President Clinton Orders the Cessation of GPS Selective Availability».
- ^ a b «Statement by the President regarding the United States’ Decision to Stop Degrading Global Positioning System Accuracy». Federal Aviation Administration. May 1, 2000. Archived from the original on 2011-10-21. Retrieved 2013-01-04.
- ^ «DoD Permanently Discontinues Procurement Of Global Positioning System Selective Availability». DefenseLink. September 18, 2007. Archived from the original on February 18, 2008. Retrieved 2008-02-20.
- ^ «Selective Availability». National space-based Positioning, Navigation, and Timing Executive Committee. Archived from the original on January 13, 2008. Retrieved 2008-02-20.
- ^ Rizos, Chris. University of New South Wales. GPS Satellite Signals Archived 2010-06-12 at the Wayback Machine. 1999.
- ^ Faraoni, Valerio (2013). Special Relativity (illustrated ed.). Springer Science & Business Media. p. 54. ISBN 978-3-319-01107-3. Extract of page 54
- ^ a b c The Global Positioning System by Robert A. Nelson Via Satellite Archived 2010-07-18 at the Wayback Machine, November 1999
- ^ Pogge, Richard W.; «Real-World Relativity: The GPS Navigation System». Retrieved 25 January 2008.
- ^ «Astronautica Acta II, 25 (1956)». 1956-08-10. Retrieved 2009-10-23.
- ^ S. P. Drake (January 2006). «The equivalence principle as a stepping stone from special to general relativity» (PDF). Am. J. Phys., Vol. 74, No. 1. pp. 22–25.
- ^ Ashby, Neil Relativity and GPS. Physics Today, May 2002.
- ^ Cerruti, A., P. M. Kintner, D. E. Gary, A. J. Mannucci, R. F. Meyer, P. H. Doherty, and A. J. Coster (2008), Effect of intense December 2006 solar radio bursts on GPS receivers, Space Weather, doi:10.1029/2007SW000375, October 19, 2008
- ^ Aarons, Jules; Basu, Santimay (1994). «Ionospheric amplitude and phase fluctuations at the GPS frequencies». Proceedings of ION GPS. 2: 1569–1578.
- ^ S. Mancuso and J. C. Raymond, «Coronal transients and metric type II radio bursts. I. Effects of geometry, 2004, Astronomy and Astrophysics, v.413, p.363-371′
- ^ Ledvina, B. M.; J. J. Makela & P. M. Kintner (2002). «First observations of intense GPS L1 amplitude scintillations at midlatitude». Geophysical Research Letters. 29 (14): 1659. Bibcode:2002GeoRL..29.1659L. doi:10.1029/2002GL014770. S2CID 133701419.
- ^ Tom Diehl, Solar Flares Hit the Earth- WAAS Bends but Does Not Break, SatNav News, volume 23, June 2004.
- ^ «I-PASS Mounting for Vehicles with Special Windshield Features» (PDF). Archived from the original (PDF) on March 26, 2010.
- ^ «3M Automotive Films».. Note that the ‘Color Stable’ films are specifically described as not interfering with satellite signals.
- ^ «The Hunt for RFI». GPS World. 1 January 2003.
- ^ «EMC compliance club «banana skins» column 222″. Compliance-club.com. Retrieved 2009-10-13.
- ^ Low Cost and Portable GPS Jammer. Phrack issue 0x3c (60), article 13. Published December 28, 2002.
- ^ American Forces Press Service. Centcom charts progress. March 25, 2003. Archived December 3, 2009, at the Wayback Machine
- ^ [1] Ofcom Statement on Authorisation regime for GNSS repeaters
- ^ Ruley, John. AVweb. GPS jamming. February 12, 2003.
- ^ US Army DAGR page Archived 2012-08-05 at archive.today
References[edit]
- Grewal, Mohinder S.; Weill, Lawrence Randolph; Andrews, Angus P. (2001). Global positioning systems, inertial navigation, and integration. John Wiley and Sons. ISBN 978-0-471-35032-3.
- Parkinson; Spilker (1996). The global positioning system. American Institute of Aeronautics & Astronomy. ISBN 978-1-56347-106-3.
- Webb, Stephen (2004). Out of this world: colliding universes, branes, strings, and other wild ideas of modern physics. Springer. ISBN 0-387-02930-3. Retrieved 2013-08-16.
External links[edit]
- GPS.gov—General public education website created by the U.S. Government
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2008 version).
- GPS SPS Performance Standard—The official Standard Positioning Service specification (2001 version).