После этого, по формулам (7.92), с учетом исправленных значений превышений, вычисляют высоты точек теодолитного хода с определением контрольного значения высоты конечной точки хода
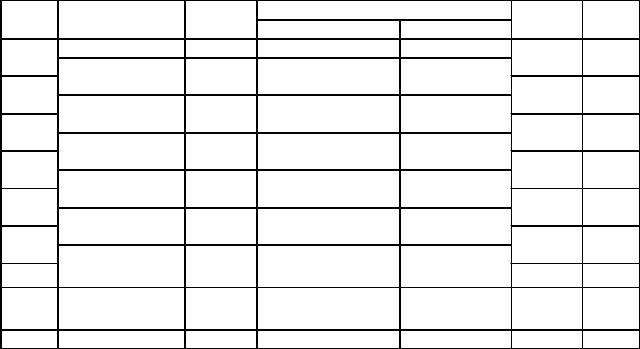
Пример обработки ведомости высот приведен в табл. 7.8 для схемы рис. 7.23.
Пример 7.16. Обработка ведомости высот разомкнутого теодолитного хода.
В схеме теодолитного хода наведение на веху, установленную в последующей точке, выполнено на высоту прибора, в связи с чем вычисление превышений производилось по формуле (7.91).
Поправки в превышения записаны в ведомости над значениями вычисленных превышений.
Жирным шрифтом выделены исходные данные.
|
Таблица 7.8 |
|||||||
|
Ведомость высот разомкнутого теодолитного хода |
|||||||
|
№№ |
Горизонтальные |
Углы |
Превышения |
Высоты |
№№ |
||
|
точек |
проложения, м |
наклона |
вычисленные |
исправленные |
точек, м |
точек |
|
|
А |
189,04 |
+4о36,5′ |
(-0,02) |
+15,22 |
142,75 |
A |
|
|
1 |
113,86 |
+2о27,0′ |
+15,24 |
157,97 |
1 |
||
|
(-0,02) |
+4,85 |
||||||
|
2 |
121,57 |
-0о43,7′ |
+4,87 |
162,82 |
2 |
||
|
(-0,02) |
-2,60 |
||||||
|
3 |
93,39 |
-2о11,3′ |
-2,58 |
160,22 |
3 |
||
|
(-0,01) |
-3,58 |
||||||
|
4 |
163,61 |
+4о08,0′ |
-3,57 |
156,64 |
4 |
||
|
(-0,02) |
+11,80 |
168,44 |
|||||
|
D |
+11,82 |
D |
|||||
|
å d = 681 ,47 |
å hВЫЧ |
= + 25,78 |
|||||
|
м |
å hТЕОР |
м |
|||||
|
= + 25,69 |
|||||||
|
м |
|||||||
|
fh =+0,09 м |
fhДОП=±0,12 м |
Замкнутый теодолитный ход во многом является частным случаем разомкнутого теодолитного хода, полагая в последнем ХН = ХК, YH = YK, HH =HK. Одной из особенностей замкнутого хода является возможность контроля результатов полевых измерений, а также оценки точности без привлечения процедуры привязки к исходным геодезическим пунктам геодезической основы (геодезической опорной сети). В соответствии с этим несколько изменим порядок обработки указанного вида теодолитных ходов.
213
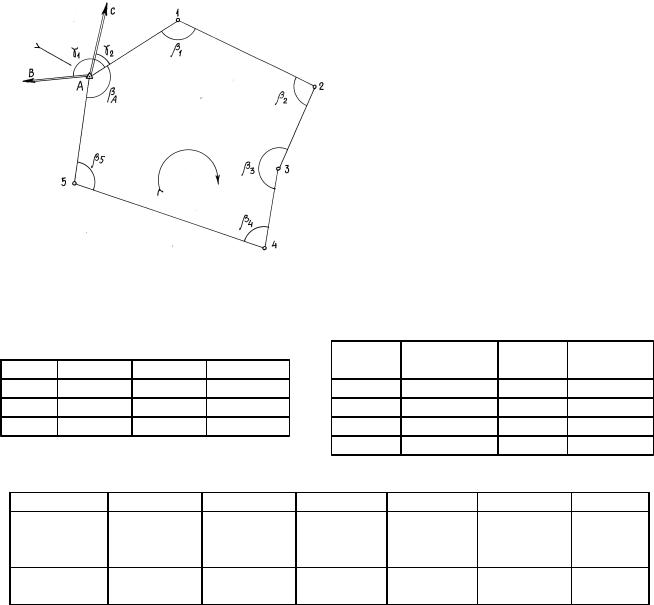
Пояснения по обработке замкнутого теодолитного хода рассмотрим совместно с примером, соответствующим схеме замкнутого хода, приведенной на рис. 7.26.
Рис. 7.26. Замкнутый теодолитный ход
представлены в табл. 7.10 и 7.11.
|
Таблица 7.9 |
|||
|
Точки |
А |
В |
С |
|
Х, м |
4216,563 |
6692,552 |
5594,790 |
|
Y, м |
7018,427 |
5172,041 |
11036,256 |
|
Н, м |
111,65 |
— |
— |
Исходные данные. Запроектирован замкнутый теодолитный ход повышенной точности (допустимая относительная погрешность 1:7500). Горизонтальные углы измерены теодолитом Т5. Длины линий измерены светодальномером с относительной погрешностью 1:10000. Углы наклона измерены теодолитом Т5 с округлением результатов до 0,1′. Допустимая угловая невязка в полигоне не более ± 10′′
 n . Координаты исходных пунктов Государственной геодезической сети представлены в таблице 7.9. Результаты измерений
n . Координаты исходных пунктов Государственной геодезической сети представлены в таблице 7.9. Результаты измерений
|
Таблица 7.10 |
|||
|
Обозна- |
Значение |
Обозна- |
Значение |
|
чение |
угла |
чение |
угла |
|
γ 1 |
154о25’00,0″ |
β 2 |
90о40’30» |
|
γ 2 |
46о38’15,6″ |
β 3 |
191о46’25» |
|
β А |
127о14’05» |
β 4 |
85о10’00» |
|
β 1 |
124о13’05» |
β 5 |
100о54’10» |
|
Таблица 7.11 |
||||||
|
Параметр |
А-1 |
1-2 |
2-3 |
3-4 |
4-5 |
5-А |
|
Наклонные |
||||||
|
расстояния |
77,396 |
109,891 |
64,282 |
56,143 |
142,789 |
77,906 |
|
S, м |
||||||
|
Углы |
-2о00,5′ |
+1о16,3′ |
+4о25,6′ |
-3о38,8′ |
+0о46,5′ |
-2о12,4′ |
|
наклона, ν |
Из решения обратных геодезических задач по дирекционным углам исходных направлений и значениям примычных углов вычислен дирекционный угол линии теодолитного хода А-1: αА1 = 117о42’15,2″. Аналогичные вычисления дирекционных углов линий теодолитного хода при его азимутальной привязке были выполнены при обработке разомкнутого теодолитного хода (§ 75). В данном случае необходимо определить только значение дирекционного угла одной линии теодолитного хода.
Пример обработки ведомости координат замкнутого теодолитного хода приведен в табл. 7.12.
214

76.1. Оценка точности угловых измерений и вычисление дирекционных углов
В замкнутом теодолитном ходе (полигоне) могут быть измерены внутренние, либо внешние горизонтальные углы β (рис. 7.26). Если принять направление обхода по часовой стрелке, то все внутренние горизонтальные углы, показанные на схеме, будут правыми по ходу.
Теоретическая сумма горизонтальных углов замкнутого многоугольника равна:
— для внутренних углов:
|
å β ТЕОР |
= 180 0 (n − 2) ; |
(7.100) |
|
— для внешних углов: |
||
|
å β ТЕОР |
= 180 0 (n + 2) , |
(7.101) |
где n – число измеренных внутренних или внешних углов.
Угловая невязка в этом случае может быть определена по формуле
|
fβ = å β ИЗМ − å β ТЕОР . |
(7.102) |
В дальнейшем обработка результатов угловых измерений подобна обработке результатов угловых измерений разомкнутого теодолитного хода: вычисление допустимой угловой невязки по формуле (7.69); проверка условия (7.70); вычисление поправок в углы и контроль их вычисления по формулам (7.71) и (7.72); исправление углов по формуле (7.73) и контроль их исправления по соблюдению равенства
|
å β ИСПР = å β ТЕОР . |
(7.103) |
Дирекционные углы линий замкнутого теодолитного хода вычисляют последовательно по ходу с контрольным вычислением дирекционного угла его линии, вычисленного при азимутальной привязке. Так, следуя обозначениям на схеме рис. 7.26 и принятому направлению хода,
|
α 23 |
= α 12 |
± 180 0 |
− |
β 2ИСПР |
|
|
α 12 |
= α А1ИСХ ± 180 0 − β 1ИСПР |
||||
|
α 34 |
= α 23 |
± 180 0 |
− |
β 3ИСПР |
|
|
α 45 = α 34 ± 180 0 − |
β 4ИСПР |
(7.104) |
|||
|
α 5 А = α 45 |
± 180 0 |
− |
β 5ИСПР |
α А1ВЫЧ = α 5 А ± 180 0 − β АИСПР
Контрольное значение дирекционного угла, полученное по последнему выражению формул (7.104) для линии А1 должно точно соответствовать его исходному значению.
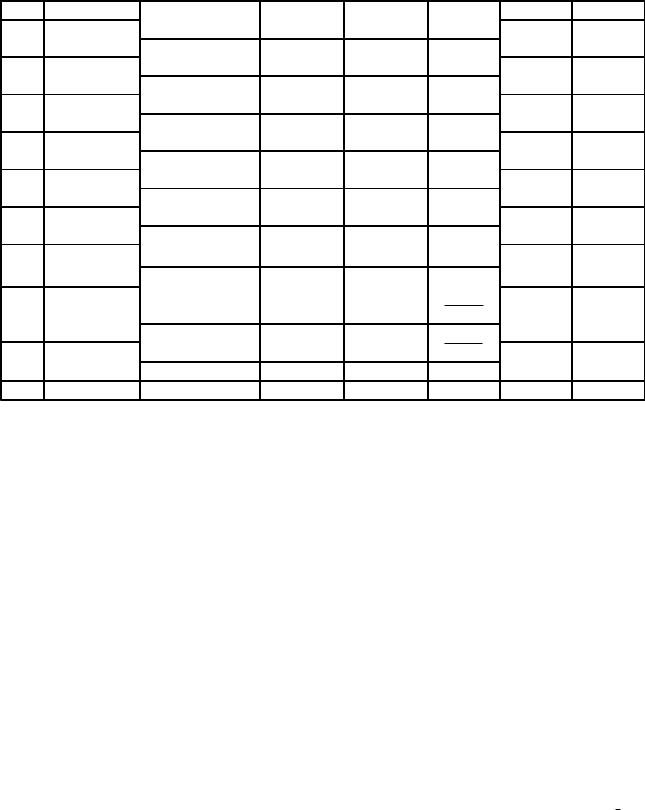
Таблица 7.12
Пример. 7.17.
Ведомость координат замкнутого теодолитного хода
|
№ |
Горизонтал |
Дирекцион- |
Горизон- |
Приращения |
Координаты, м |
|||
|
№ |
ьные углы |
ные углы |
тальные |
координат, м |
||||
|
то- |
β |
α |
проложе- |
(поправки) |
||||
|
чек |
(поправки) |
ния, м |
Х |
Y |
X |
Y |
||
|
d |
||||||||
|
А |
4216,563 |
7018,427 |
215
|
1 |
117о42’15,2″ |
77,348 |
(-0,005) |
(-0,006) |
|||
|
(+3,1″) |
-35,960 |
+68,481 |
4180,598 |
7086,902 |
|||
|
2 |
124о15’12« |
173о27’00,1″ |
109,854 |
(-0,007) |
(-0,009) |
||
|
(+3,2″) |
-109,137 |
+12,531 |
4071,454 |
7099,424 |
|||
|
3 |
90о40’14« |
262о46’42,9″ |
64,090 |
(-0,004) |
(-0,005) |
||
|
(+3,3″) |
-8,056 |
-63,582 |
4063,394 |
7035,837 |
|||
|
4 |
191о46’32« |
251о00’07,6″ |
56,029 |
(-0,004) |
(-0,005) |
||
|
(+3,2″) |
-18,239 |
-52,977 |
4045,151 |
6982,855 |
|||
|
5 |
85о09’36« |
345о50’28,4″ |
142,786 |
(-0,009) |
(-0,013) |
||
|
(+3,1″) |
+138,448 |
-34,927 |
4183,590 |
6947,915 |
|||
|
А |
100о54’12« |
64о56’13,3″ |
77,848 |
(-0,005) |
(-0,006) |
4216,563 |
7018,427 |
|
(+3,1″) |
å d |
+32,978 |
+70,518 |
||||
|
127о13’55« |
117о42’15,2« |
fX |
fY |
||||
|
1 |
å β ИЗМ |
527,955 |
+0,034 |
+0,044 |
|||
|
719о59’41» |
fАБС |
fОТН = |
|||||
|
å β ТЕОР |
0,0556 |
1 |
|||||
|
720о00’00» |
fОТН ДОП |
9500 |
|||||
|
fβ |
-19″ |
1 |
|||||
|
7500 |
|||||||
|
fβ доп |
± 24″ |
76.2. Вычисление приращений координат и оценка точности хода
Поскольку начальная и конечная точки замкнутого теодолитного хода совмещены, то, как следует из формул (7.77), теоретические суммы приращений координат, вычисленных из решения прямой геодезической задачи, должны быть равны нулю, т.е.
|
å Х ТЕОР = 0 ; å YТЕОР = 0 , |
(7.105) |
а невязки в приращениях координат определятся только суммами полученных соответствующих приращений
|
f X = å X ВЫЧ ; fY = å YВЫЧ . |
(7.106) |
Далее оценка точности хода заключается в вычислении абсолютной невязки хода (7.80), относительной невязки хода (7.81) и в сравнении последней с допустимой относительной невязкой, установленной для данного вида работ соответствующей инструкцией или техническим заданием.
По аналогии с разомкнутым теодолитным ходом физический смысл невязок в приращениях координат тот же (рис. 7.24 б).
76.3. Уравнивание приращений координат и вычисление координат точек хода
Поправки в приращения координат (весовые) вычисляются по формулам (7.84) с контролем их вычислений по формулам (7.85). Контрольные суммы исправленных (7.86) приращений координат для замкнутого теодолитного хода должны быть равны нулю, т.е.
|
å Х ИСПР = 0 ; å YИСПР = 0 . |
(7.107) |
216
Добро пожаловать!
Войдите или зарегистрируйтесь сейчас!
Войти
-

- Регистрация:
- 13 мар 2010
- Сообщения:
- 14
- Симпатии:
- 0
какую информацию можно извлечь из относительной ошибки? например линейная погрешность или что то в этом роде. пожалуйста привидите пример.
#1
-
Форумчанин
- Регистрация:
- 16 авг 2008
- Сообщения:
- 5.139
- Симпатии:
- 637
- Адрес:
-
Химки
1/2000 = 1 м на 2 км
То есть, линейная погрешность в 1 м на 2 км хода дает 1/2000.#2
-
- Регистрация:
- 13 мар 2010
- Сообщения:
- 14
- Симпатии:
- 0
это я знаю, а еще что нибудь из нее нельзя извлечь?
#3
-
Форумчанин
- Регистрация:
- 16 авг 2008
- Сообщения:
- 5.139
- Симпатии:
- 637
- Адрес:
-
Химки
Попробуйте, может, получится;)
#4
-
Форумчанин
а вы что хотите извлечь то, вы расскажите причину столь странного интереса…
#5
-
- Регистрация:
- 13 мар 2010
- Сообщения:
- 14
- Симпатии:
- 0
нам преподаватель говорит, что относительная ошибка дает много информации, но не рассказывает, мол мы сами все знаем. а я кроме линейной погрешности ничего незнаю

#6
-
Форумчанин
- Регистрация:
- 5 мар 2010
- Сообщения:
- 175
- Симпатии:
- 4
- Адрес:
-
Москва
ну, скажем, на первый взгляд: в теодолитном ходе если угловая невязка в допуске а относительная ошибка слишком большая, то это логично говорит о том что у вас есть ошибка в длинах линий, если же вы проверили все длины линий и поняли что они все верны, а относительная ошибка хода по-прежнему вас не устраивает, то у вас ошибка как минимум в двух углах поворота, причем эти ошибки взаимно исключают друг друга.. (а преподаватели, к слову, пользуются относительной ошибкой часто для того что бы определить подгонялись ли углы в ходе или нет.. )
Случай с ошибкой в исходных данных тоже может быть выявлен таким образом..
#7
-
Форумчанин
Самую полезную для студента информацию несет не относительная ошибка, а абсолютные ошибки приращений координат. В случае, если в небольшом ходе Вы где-то пролетели с измерением длин линий лентой (на метр, двадцать метров, остаток до другого края ленты), ним легко узнать дир. угол линии, в которой сидит промах. Как — не скажу, сами догадайтесь.
И тогда в поисках ошибки не придется перемерять весь полигон.#8
-
Форумчанин
Для теодолитного хода относительная ошибка вычисляется по формуле =√ΣΔX²+ ΣΔY²/P<1/2000, где ΣΔX, ΣΔY — суммы приращений координат, Р — периметр полигона, т.е. относительная ошибка позволяет определить еще и ошибку в вычислениях превышений.
Относительная ошибка как правило характеризует точность линейных измерений. Например, относительная ошибка нитяного дальномера составляет 1/300, ошибка измерения рулеткой 1/2000, значит линия в 50 м в первом случае будет определена с точностью ±17 см, а во втором ±2,5см#9
-
Форумчанин
- Регистрация:
- 5 мар 2010
- Сообщения:
- 175
- Симпатии:
- 4
- Адрес:
-
Москва
не понял.. а это то откуда?
#10
-
Форумчанин
- Регистрация:
- 30 ноя 2007
- Сообщения:
- 2.680
- Симпатии:
- 2.399
- Адрес:
-
Сибирь
А если промахнулись в двух линиях?
#11
-
Форумчанин
Извините приращений координат
#12
-
- Регистрация:
- 13 мар 2010
- Сообщения:
- 14
- Симпатии:
- 0
спасибо за участие в этом вопросе.
#13
-
Форумчанин
Тогда уже не узнать
Если трасса, и углы близки к 180 градусам, то тоже.
Но в теодолито-рулеточную эпоху этим методом пользовались частенько. Помогало.
#14





Поделиться этой страницей
Самой распространённой процедурой в инженерной геодезии считается построение теодолитного хода – системы ломаных линий и измеренных между ними углов. Замкнутым его называют, если он опирается только на один исходный пункт, а его стороны образуют многоугольную фигуру. Рассмотрим подробнее, как создается теодолитный ход замкнутого типа и какие у него особенности.
Содержание
- 1 Разновидности теодолитных ходов
- 2 Порядок выполнения работ
- 3 Обработка данных
- 4 Уравнивание
- 5 Определение дирекционных углов
- 5.1 Создавайте будущее вместе с нами
- 6 Вычисление румбов
- 7 Приращения координат
- 8 Линейная невязка и невязка приращения значений координат
- 9 Вычисление координат
Разновидности теодолитных ходов
Ходы могут образовывать целые сети, пересекаясь между собой и охватывая значительные территории, а их форма определяется особенностями местности. Их принято разделять на:
– замкнутый (полигон);
– разомкнутый;
– висячий;
– диагональный (прокладывают внутри других ходов).Если необходимо заснять ровный участок, вроде строительной площадки, лучшим выбором будет полигон. На объектах вытянутого типа, вроде автодорог, принято использовать разомкнутый ход, а висячий – для съемки закрытой местности, вроде глухих улиц.

Замкнутый ход по своей сути является многоугольной фигурой и опирается только на один базовый пункт с установленными координатами и дирекционным углом. Вершинами стороны выступают точки, закрепленными на местности, а отрезками – расстояние между ними. Его чаще всего создают для съемки стройплощадок, жилых зданий, промышленных сооружений или земельных участков.
Порядок выполнения работ
Как и другие геодезические мероприятия, эта процедура проводится с предварительной подготовкой для получения точных метрических данных. Немаловажную роль играет также их математическая обработка. Сами работы выполняются по принципу от общего к частному и состоят из следующих этапов:
- Рекогносцировка местности. Оценка снимаемой территории, изучение ее особенностей. На этом этапе определяется местоположение снимаемых точек.
- Полевая съемка. Работы непосредственно уже на местности. Выполнение линейных и угловых измерений, составление абрисов, предварительные расчеты и внесение изменений при необходимости.
- Камеральная обработка. Завершающий этап работ, который заключается в вычислении координат замкнутого теодолитного хода и последующего составления плана и технического отсчета.
Рекогносцировка и полевые измерения выполняются непосредственно на объекте и являются наиболее трудоемкими и затратными мероприятиями. Тем не менее, от качества их проведения зависит дальнейший результат.
Обработка данных проводится уже в помещении. Сегодня она осуществляется при помощи специального программного обеспечения, хотя и ручные расчеты все также остаются актуальными и могут быть использованы геодезистом в целях проверки.
Обработка данных
Обработка результатов измерений замкнутого теодолитного хода позволит оценить качество проделанной работы и внести исправления в полученные геометрические величины. Чтобы убедится в том, что угловые и линейные измерения находятся в допуске, еще во время полевых работ выполняют первичные расчеты.
Для вычисления значений координат точек замкнутого хода используют такие данные:
– координаты исходного пункта;
– исходный дирекционный угол;
– горизонтальные углы;
– длины сторон.

Полевые измерения, выполненные даже при соблюдении всех правил и требований, будут иметь неточности. Они обусловлены систематическими и техническими ошибками, а также человеческим фактором.
Расчеты проводятся в определенной последовательности, которую рассмотрим далее.
Уравнивание
При начале расчетов определяют теоретическую сумму углов , а потом увязывают их, распределяя между ними угловую невязку.
(sum beta _{теор}=180^{circ}cdot (n-2))
n- количество точек полигона;
(f_{beta }=sum beta _{изм}-180^{circ}cdot (n-2))
(sum beta _{изм})– значение измеренных угловых величин;
Для получения (f_{beta }), необходимо рассчитать разность между (beta _{изм}), в которой присутствуют погрешности, и (sum beta _{теор}).
В уравнивании (f_{beta }) выступает как показатель точности проведенных измерительных работ, а ее значение не должно быть выше предельной величины, определяемой из следующей формулы:
(f_{beta 1}=1,5tsqrt{n})
t-точность измерительного устройства,
n – количество углов.
Уравнивание заканчивается равномерным распределением полученной невязки между угловыми величинами.
Определение дирекционных углов
При известном значении дирекционного угла ((alpha )) одной стороны и горизонтального ((beta )) можно определить значение следующей стороны:
(alpha _{n+1}=alpha _{n}+eta )
(eta =180^{circ}-beta _{пр})
(beta _{пр})– значение правого по ходу угла, из чего следует:
(alpha _{n+1}=alpha _{n}+180^{circ}-beta _{пр})
Для левого ((beta _{лев})) эти знаки будут противоположными:
(alpha _{n+1}=alpha _{n}-180^{circ}+beta _{лев})
Создавайте будущее вместе с нами
Присоединяйтесь к нашей команде: мы создаем финтех-сервисы для 28 млн клиентов и опережаем рынок на 5 лет. Работаем на результат и делаем больше, чем от нас ждут.
Поскольку значение дирекционного угла не может быть больше, чем (360^{circ}), то из него, соответственно, отнимают (360^{circ}). В случае с отрицательным углом, необходимо к предыдущему (alpha ) добавить (180^{circ}) и отнять значение (beta _{испр}).
Вычисление румбов
У румбов и дирекционных углов существует взаимосвязь, а определяют их по четвертям, которые носят название четырех сторон света. Как видно из табл.1. расчёты проводят согласно установленной схеме.
Таблица 1. Расчеты румба в зависимости от пределов дирекционного угла.
| Четверть | Название относительно стороны света | Пределы α | Формула | Знаки приращений | |
| ΔХ | ΔУ | ||||
| I | СВ (северо-восточный) | 0° – 90° | r = α | + | + |
| II | ЮВ (юго-восточный) | 90°-180° | r = 180° – α | – | + |
| III | ЮЗ (юго-западный) | 180°-270° | r = α – 180° | – | – |
| IV | СЗ (северо-западный) | 270°-360° | r = 360° – °α | + | – |
Приращения координат
Для приращений координат в замкнутом ходе применяют формулы, использующиеся при решении прямой геодезической задачи. Ее суть состоит в том, что по известным значениям координат исходного пункта, дирекционного угла и горизонтального приложения можно определить координаты следующего. Исходя из этого, формула приращения значений будет иметь следующий вид:
(Delta X = dcdot cos alpha )
(Delta Y = dcdot sin alpha )
d-горизонтальное проложение;
α-горизонтальный угол.

Для полигона, который имеет вид замкнутой геометрической фигуры, теоретическая сумма приращений будет равняться нулю для обеих координатных осей:
(sum Delta X_{теор}= 0)
(sum Delta Y_{теор}= 0)
Линейная невязка и невязка приращения значений координат
Несмотря на вышесказанное, случайные погрешности не позволяют алгебраическим суммам выйти в ноль, поэтому они будут равняться другим невязкам приращений координат:
(f_{x}sum_{i=1}^{n}Delta X_{1})
(f_{y}sum_{i=1}^{n}Delta Y_{1})
Переменные (f_{x}) и (f_{y}) – проекции линейной невязки (f_{p}) на координатной оси, которую можно рассчитать по формуле:
(f_{p}=sqrt{f_{x}^{2}+f_{y}^{2}})
При этом (f_{p}), не должно быть боле, чем 1/2000 от доли периметра полигона, а распределения (f_{x}) и (f_{y}) проводится следующим образом:
(delta X_{i}=-frac{f_{x}}{P}d_{i} )
(delta Y_{i}=-frac{f_{y}}{P}d_{i} )
В этих формулах (delta X_{i}) и (delta Y_{i}) – поправки приращения координат.
і- номера точек;
В расчетах важно не забывать о значениях алгебраической суммы, иначе говоря – знаках. При внесении поправок они должны быть противоположны знакам невязок.
После приращений и внесения поправок в данные измерений, проводят расчет их исправленных значений.
Вычисление координат
Когда будут произведены увязки приращений точек полигона, следует определение координат, которое осуществляют с использованием следующих формул:
(X_{пос}=X_{пр}+Delta X_{исп})
(Y_{пос}=Y_{пр}+Delta Y_{исп})
Значения (X_{пос}) (Y_{пос}) – координаты последующих пунктов, (X_{пр}) и (Y_{пр}) – предыдущих.
(Delta X_{исп}) и (Delta Y_{исп}) – исправленные приращения между этими двумя значениями.
Если координаты первой и последней точки совпадают, то обработку можно считать завершённой.
На основе полученных координат и составленных во время полевых измерений абрисов в дальнейшем составляется план теодолитного хода.
Результатом теодолитной съёмки является плановое положение контуров и местных предметов. Теодолитная съёмка обычно производится сравнительно на небольших участках местности, изображаемых в последующем на топографических планах крупных масштабов.
Геодезической основой для теодолитной съёмки являются теодолитные ходы, сгущаемые от пунктов Государственной геодезической сети 1-4 классов, а также пунктов сетей 1 и 2 разрядов. Формы ходов зависят от характера снимаемой местности. Так, при съёмке площадных объектов целесообразно использовать замкнутые ходы в сочетании с диагональными и висячими ходами, при съёмках линейных сооружений – разомкнутые в сочетании, в основном, с висячими ходами.
Теодолитная (горизонтальная, плановая) съёмка выполняется при помощи теодолита и мер длины (лента, рулетка) или дальномеров. Предельная погрешность (mS) положения пунктов плановой съёмочной сети относительно пунктов ГГС или ГСС не должна превышать 0,2 мм в масштабе плана.
Теодолитные ходы прокладываются с предельными относительными погрешностями 1:3000, 1:2000, 1:1000 в зависимости от условий съёмки (см.таблицу)
| Масштаб плана | mS | ||
|---|---|---|---|
| 1:3000 | 1:2000 | 1:1000 | |
| Допустимые длины ходов между исходными пунктами, км | |||
| 1 : 5000 | 6,0 | 4,0 | 2,0 |
| 1 : 2000 | 3,0 | 2,0 | 1,0 |
| 1 : 1000 | 1,8 | 1,2 | 0,6 |
| 1 : 500 | 0,9 | 0,6 | 0,3 |
Теодолитная съёмка ситуации выполняется способами угловой и линейной засечек, полярных координат, перпендикуляров, обхода, створов и комбинированными способами. Часть указанных способов была рассмотрена ранее в гл. 7 при пояснениях вопросов привязки точек съёмочного обоснования.
Способ угловой засечки используют для съёмки точек, недоступных для непосредственных линейных измерений. На план снятые пикеты наносят графически либо по координатам, предварительно вычисленным по формулам Юнга. В частности, указанный способ использован для получения положения острова (точки а – ж) – рис. 8.2. Вокруг озера проложен для выполнения съёмки способом обхода замкнутый теодолитный ход, привязанный к исходной геодезической основе АВ.

Способы теодолитной съёмки рис.1

Способы теодолитной съёмки рис.2
На рис. 1 способом линейной засечки получено положение точки к, находящейся на берегу озера. На рис. 2 таким же способом получено положение точек 1 и 2 здания. Обычно точки местности, полученные способом линейной засечки, наносят на план графически по соответствующим расстояниям.
Способ полярных координат применяют для съёмки точек, находящихся в прямой видимости сравнительно недалеко от точек и линий теодолитного хода. При этом целесообразно, чтобы измеряемые расстояния не превышали длины мерного прибора (ленты или рулетки). При больших углах наклона в измеренное расстояние вводят поправку за наклон для получения горизонтального проложения. На рис. 1 таким способом получены точки и и з одновременно с выполнением угловой засечки. На рис. 2 указанный способ использован для съёмки точек 7 и 8 сооружения. Точки на план наносят графически по значению горизонтального угла и горизонтального проложения либо по координатам, предварительно вычисленным из решения прямой геодезической задачи с точек съёмочного обоснования.
Если съёмочные пикеты находятся вблизи от линии съемочного обоснования, то удобно использовать для их съёмки способ перпендикуляров (прямоугольных координат). На рис. 1 таким способом получено положение точек л – ф береговой линии озера, а на рис. 2 – точки 3, 4, 5 и 6 здания. Часто линию съёмочного обоснования принимают за ось х, а перпендикулярную к ней линию – за ось y условной системы координат. При этом значения координат х и y съемочных пикетов могут быть положительными и отрицательными. Результаты измерений оформляют в виде таблицы и соответствующего абриса, похожего на приведённые рисунки, с полным указанием на нем результатов измерений и привязок к точкам и линиям съёмочного обоснования. Абрис составляют обычно на одну из линий съёмочного обоснования либо на две-три таких смежных линии. Пикеты, полученные способом перпендикуляров, наносят на план графически. В отдельных случаях вычисляют и прямоугольные координаты этих пикетов. При этом необходимо преобразовать принятую для съёмки условную систему координат в используемую систему координат съёмочного обоснования. Решение такой задачи сложности не представляет: для этого достаточно только определить дирекционный угол направления условной оси х и координаты начала условной системы координат, если выбранная ось х (линия створа) не совпадает с линией съёмочного обоснования. Если же ось х совпадает с линией съёмочного обоснования, то задача определения координат съёмочных пикетов сразу сводится к решению прямой геодезической задачи.
О способе обхода уже было сказано выше (см. рис. 1). Этот способ чаще используется для съёмки контуров, имеющих значительную площадь. Вокруг контура прокладывают дополнительный замкнутый теодолитный ход и с точек и линий этого хода любыми известными способами получают положение искомых пикетов.
Ответственные точки местности часто снимают повторно с других станций либо на той же станции, но другим способом (комбинированный способ съёмки). Комбинированный способ съёмки может быть реализован, например, одновременным получением координат точки способом угловой и линейной засечек при использовании электронных тахеометров.
Если линия съёмочного обоснования пересекает контур объекта местности, линейный контур сооружения, то положение точки пересечения фиксируют промерами в створе линии съёмочного обоснования. Такой способ называют способом створов. Часто створ задают отдельно от линии съёмочного обоснования направлением, а положение точек местности от него получают способом перпендикуляров. В этом случае как раз и необходимо для получения координат съёмочных пикетов определить дирекционный угол линии створа и координаты одной из его точек, например, начала координат условной системы.
При съёмках зданий обязательно производят полные их обмеры. Это позволяет пополнить недостающие элементы контура здания, а также является надежным контролем результатов съёмки. Контрольные промеры выполняют и между точками твердых контуров, полученных с разных станций либо с одной станции, но независимо от другой точки.
Такие промеры могут быть выполнены между углами двух соседних зданий, между углами одного и того же здания сложной конфигурации, между точкой-ориентиром и углом здания и т.п.
Горизонтальные углы при теодолитной съёмке измеряют теодолитом полным приёмом, во многих случаях и расстояния измеряют дважды – в прямом и обратном направлениях, если они значительно превышают длину мерного прибора. Центрирование теодолита в точке съёмочного обоснования должно обеспечить необходимую точность измерения горизонтальных углов.