Для
оценки точности воспроизведения
непрерывных функций часто используются
коэффициенты
ошибок,
которые оказываются наиболее удобными
для управляющих сигналов класса
полиномов.
Оригиналом
по отношению к изображению

служит импульсная переходная характеристика
 .
.
Ошибку можно вычислить с помощью
интеграла Дюамеля
 .
.
(10.8)
Если
управляющее воздействие представляет
собой непрерывную медленно меняющуюся
функцию, то ее выгодно представить в
виде разложения по степеням

 ,
,
ограничившись
небольшим числом слагаемых. Подставив
это разложение в (10.8), получим выражение
вида
 ,
,
(10.9) где

(10.10) называются коэффициентами
ошибки.
интегралы
вида (10.10) называются моментами
порядка r
функции
 .
.
Вычисление коэффициентов ошибки не
обязательно выполняется интегрированием.
Если продифференцировать r
раз
преобразование Лапласа по s

положить затем s
= 0 , то, как
легко видеть, получится выражение вида
(10.10). Вычисления выполняются особенно
просто, если передаточную функцию

представить в виде разложения в
окрестности точки s
= 0

(10.11)
причем
для этого нет необходимости в многократном
дифференцировании, имея в виду, что все
передаточные функции принадлежат к
классу дробно-рациональных и легко
представляются в виде разложения путем
деления полиномов, расположенных по
возрастающим степеням s.
Коэффициенты
ошибок наиболее наглядно показывают,
какую роль в точности автоматических
систем играет коэффициент усиления в
разомкнутом состоянии и так называемый
порядок
астатизма,
с которым необходимо предварительно
познакомиться.
БИЛЕТ
№ 10
1.Преобразование многоконтурных структурных схем.
Автоматические
системы, структурная схема которых
содержит более одного контура называются
многоконтурными.
В целом ряде задач необходимо уметь
преобразовать многоконтурную структурную
схему к одноконтурной и мы рассмотрим
здесь несколько типичных случаев. На
рис.6.6 показана структурная схема с
внутренним стабилизирующим контуром
с гибкой обратной связью.
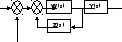
Рис.6.6.Следящая
система с внутренним стабилизирующим
контуром
Преобразование
этой схемы к одноконтурной можно
выполнить двумя путями. Первый путь
состоит в записи передаточной функции
внутреннего контура в виде известного
нам выражения (6.3).После такого
преобразования система становится
одноконтурной с жесткой обратной связью
(рис.6.7).Передаточная функция при
размыкании этой обратной связи
записывается в виде
 .
.
Второй
способ состоит в суммировании передаточных
функций Y(s)
и
Z(s).
Система также становится одноконтурной,
но передаточная функция ее при размыкании
контура выглядит иначе

Таким
образом, операция преобразования
структурных схем может приводить к
различным вариантам передаточных
функций разомкнутой системы.
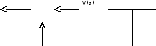
Рис.6.7.Результат
преобразования структурной схемы,
изображенной на рис.6.6.
Рассмотрим
еще пример преобразования схемы с
перекрестной
обратной
связью
(рис.6.8).
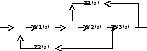
А)
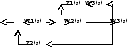 Б)
Б)
Рис.6.8.Преобразование
структурной схемы с перекрестной
обратной связью.
После
получения варианта Б) дальнейшие
преобразования сводятся к уже рассмотренным
случаям и не требуют комментариев.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Функция
f(t) называется
периодической, если существует величина
T,
такая что для любого значения t
f(t+T)=f(t).
Наименьшая из величин T
называется
периодом.
Весьма
широкий класс периодических функций
можно разложить в ряд Фурье
 .(2.1)
.(2.1)
Здесь
коэффициенты ak
и
bk
вычисляются с помощью соотношений

 ,(2.2)
,(2.2)
Ряду
Фурье можно придать комплексную форму,
если воспользоваться соотношениями
 и
и
 .
.
Введем
обозначение
 и, замечая, что согласно (2.2)
и, замечая, что согласно (2.2)
 ,
,
запишем ряд (2.1) в комплексной форме (2.3)
(2.3)
Нетрудно
заметить, что коэффициенты в (2.3)
вычисляются с помощью формулы, вытекающей
из (2.2), а именно
 .
.
(2.4)
Введем
обозначение
 . Очевидно при этом приращение
. Очевидно при этом приращение и, следовательно, согласно (2.3) и (2.4),
и, следовательно, согласно (2.3) и (2.4), (2.5)
(2.5)
Переходя
к пределу в (2.5) при
 и обозначая
и обозначая ,
,
(2.6) запишем (2.7)
(2.7)
Мы
получили соотношения, которые играют
в дальнейшем важную роль во всей изучаемой
нами дисциплине. Это прямое
(2.6) и обратное
(2.7)
преобразования
Фурье.
Предельный переход означает, что мы
распространили ряд Фурье на непериодические
функции, и этим существенно расширили
класс исследуемых сигналов.
Заметим,
что функция
 ,
,
фигурирующая в формуле прямого
преобразования должна допускать
сходимость несобственного интеграла.
Разумеется, не все функции обладают
этим свойством. Например, функция1/t
не может быть преобразована по Фурье —
она недостаточно быстро убывает (кроме
того, она имеет разрыв при t=0).
Для того, чтобы гарантировать сходимость
несобственного интеграла в (2.5),во многих
случаях достаточно предварительно
умножить преобразуемую функцию на
экспоненту с отрицательным показателем,
т.е. рассматривать в дальнейшем такие
функции, которые допускают существование
интеграла (2.8)
(2.8)
Константа
с называется
абсциссой абсолютной сходимости, а
преобразование вида (2.8) называется
прямым
преобразованием Лапласа.
В
соответствии с введенным обозначением
для параметра s
можно записать
и обратное
преобразование
(2.7) в форме
 .(2.9)
.(2.9)
принято
называть
 изображением
изображением
по Лапласу
функции
 ,
,
которая в свою очередь называетсяоригиналом.
2.Коэффициенты ошибок следящих систем.
Для
оценки точности воспроизведения
непрерывных функций часто используются
коэффициенты
ошибок,
которые оказываются наиболее удобными
для управляющих сигналов класса
полиномов.
Оригиналом
по отношению к изображению
 служит импульсная переходная характеристика
служит импульсная переходная характеристика .
.
Ошибку можно вычислить с помощью
интеграла Дюамеля .
.
(10.8)
Если
управляющее воздействие представляет
собой непрерывную медленно меняющуюся
функцию, то ее выгодно представить в
виде разложения по степеням

 ,
,
ограничившись
небольшим числом слагаемых. Подставив
это разложение в (10.8), получим выражение
вида
 ,
,
(10.9) где (10.10) называютсякоэффициентами
(10.10) называютсякоэффициентами
ошибки.
интегралы
вида (10.10) называются моментами
порядка r
функции
 .
.
Вычисление коэффициентов ошибки не
обязательно выполняется интегрированием.
Если продифференцироватьr
раз
преобразование Лапласа по s

положить затем s
= 0 , то, как
легко видеть, получится выражение вида
(10.10). Вычисления выполняются особенно
просто, если передаточную функцию
 представить в виде разложения в
представить в виде разложения в
окрестности точкиs
= 0
 (10.11)
(10.11)
причем
для этого нет необходимости в многократном
дифференцировании, имея в виду, что все
передаточные функции принадлежат к
классу дробно-рациональных и легко
представляются в виде разложения путем
деления полиномов, расположенных по
возрастающим степеням s.
Коэффициенты
ошибок наиболее наглядно показывают,
какую роль в точности автоматических
систем играет коэффициент усиления в
разомкнутом состоянии и так называемый
порядок
астатизма,
с которым необходимо предварительно
познакомиться.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Установившееся значение  ошибки воспроизведения задающего воздействия, являющегося произвольной, но достаточно плавной функцией времени, можно определить с помощью коэффициентов
ошибки воспроизведения задающего воздействия, являющегося произвольной, но достаточно плавной функцией времени, можно определить с помощью коэффициентов 

Коэффициенты ошибки вычисляются по передаточной функции для ошибки слежения и ее производным по  при
при 

В статической системе  в астатической
в астатической  в астатической второго порядка
в астатической второго порядка  Могут быть системы с астатизмом третьего порядка и более высокого.
Могут быть системы с астатизмом третьего порядка и более высокого.
Формулы для вычисления первых четырех коэффициентов ошибки воспроизведения задающего воздействия (коэффицентов ошибки слежения) приведены в табл. 7.1. Формулы содержат коэффициенты передаточной функции  разомкнутой системы, и, следовательно, отпадает необходимость в составлении передаточной функции
разомкнутой системы, и, следовательно, отпадает необходимость в составлении передаточной функции 
Пример 7.1. Вычислить коэффициенты  ошибки слежения если передаточная функция разомкнутой системы
ошибки слежения если передаточная функция разомкнутой системы

Система пятого порядка астатическая, и для вычисления коэффициентов ошибки можно воспользоваться формулами поз. 8 табл. 7.1. В данном случае 
Подставив эти значения коэффициентов в формулы, получим 
По передаточной функции  ошибки от возмущения могут быть вычислены коэффициенты ошибки от возмущения:
ошибки от возмущения могут быть вычислены коэффициенты ошибки от возмущения:

Эти коэффициенты позволяют определить установившееся значение ошибки, создаваемой возмущением, если оно является достаточно медленно изменяющейся функцией времени:

Формулы для вычисления коэффициентов ошибки по коэффициентам передаточной функции системы для ошибки приведены в табл. 7.2. Эти формулы могут быть использованы как для вы числения  так и для вычисления
так и для вычисления 
Пример 7.2. В системе со структурной схемой, изображенной на рис. 7.1, передаточные функции ее участков имеют следующие значения:

Вычислить установившееся значение ошибки, если задающее воздействие  а возмущения
а возмущения 
Составим передаточную функцию разомкнутой системы:

По формулам поз. 2 табл. 7.1 определим коэффициенты ошибки от задающего воздействия:

Следовательно, согласно формуле 
Составим передаточную функцию для ошибки от возмущения (учитывая знак воздействия возмущения и обратной связи):

Для вычисления коэффициентов ошибки от возмущения можно воспользоваться формулами поз. 1 табл. 7.2. В данном случае 

(кликните для просмотра скана)

(кликните для просмотра скана)

(кликните для просмотра скана)

(кликните для просмотра скана)
Подставив эти значения коэффициентов передаточной функции в формулы, получим 
Согласно формуле (7.9) имеем

В соответствии с формулой (7.1) суммарное значение установившейся ошибки

Передаточная функция для ошибки есть дробно-рациональная функция от  поэтому значения коэффициентов ошибки можно вычислить делением ее числителя (начиная с младшего члена) на знаменатель. Такой прием следует применять, когда нельзя использовать данные табл. 7.1 и 7.2. При этом удобно пользоваться техникой подвижной полосы [55]. Перед расчетом передаточную функцию для ошибки (слежения или от возмущения) приводят к виду
поэтому значения коэффициентов ошибки можно вычислить делением ее числителя (начиная с младшего члена) на знаменатель. Такой прием следует применять, когда нельзя использовать данные табл. 7.1 и 7.2. При этом удобно пользоваться техникой подвижной полосы [55]. Перед расчетом передаточную функцию для ошибки (слежения или от возмущения) приводят к виду

Затем на полосу бумаги (на подвижную полосу) выписывают столбиком  и на листе бумаги (на неподвижную полосу) выписывают столбиком
и на листе бумаги (на неподвижную полосу) выписывают столбиком  . В статической системе
. В статической системе  в астатической
в астатической  и несколько последующих коэффициентов
и несколько последующих коэффициентов  равны нулю.
равны нулю.
Подвижную полосу кладут слева от неподвижной так, чтобы осталось место для записи результатов. Сначала нижняя цифра подвижной полосы должна находиться в одной строке с верхней цифрой неподвижной полосы. Затем подвижную полосу постепенно перемещают вниз.
В каждом положении подвижной полосы ее нижнюю цифру умножают на цифру неподвижной полосы в той же строке. Каждую из остальных цифр подвижной полосы умножают на находящуюся рядом цифру из столбца «Результат». Сумму всех произведений записывают в столбец «Результат», рядом с нижней цифрой подвижной полосы.
Цифры из столбца «Результат», начиная с верхней, после умножения на  являются коэффициентами ошибки
являются коэффициентами ошибки 
Поэтому расчет нужно продолжать, пока в столбце «Результат» не окажется столько цифр, сколько коэффициентов ошибки необходимо вычислить.
Пример 7.3. Вычислить коэффициенты ошибки слежения  для системы, у которой передаточная функция
для системы, у которой передаточная функция

Таблица 7.3 (см. скан) Расчет к примеру 7.3
Расположение полос при расчете показано в табл. 7.3 для каждого подсчета. Запись подсчетов имеет вид:

Следовательно, коэффициенты ошибки имеют следующие значения: 
Данные для определения коэффициентов ошибки по ЛАЧХ минимально-фазовой системы приведены в табл. 9.6.