Содержание
- 1 Общие параметры
- 2 Регуляторы стандартные
- 2.1 Схема симисторная
- 2.2 Реостатная схема
- 2.3 Интегральная
- 3 Самостоятельное создание регулятора
- 3.1 Способ 2
- 4 Частотная регулировка
- 5 Изменение числа полюсов
- 6 Проведение регулирование в моторах АС
- 6.1 При помощи напряжения
- 6.2 Определение сопротивления
- 6.3 Применение двойного питания
- 7 Вывод
При эксплуатации коллекторных электродвигателей нередко возникает необходимость в регулировании оборотов устройства. Важно при этом не снизить общие показатели мотора, чтобы работа не пошла насмарку. Рассмотрим же детально особенности самостоятельного регулирования.

Регулятор по схеме
Силовые агрегаты данного типа активно используются в бытовой электрической технике, инструментах: стиральных машинах, болгарках, пылесосах, дрелях, квадрокоптерах и др. это обусловливается высокой результативностью приборов, которые демонстрируют большое число оборотов и высоким крутящим моментом (также и пусковым). Данных технических характеристик с лихвой хватает на обеспечения работы техники и инструментов на требуемом уровне.
Сами моторы работают от сетей как постоянного, так и переменного токов, от обычных бытовых сетей. Чтобы осуществить управление скоростями оборотов ротора такого двигателя, необходимо использовать специальные регуляторы. При этом потери в мощностях будут минимальными.
Общие параметры
Принцип работы и общая конструкция таких силовых агрегатов известны большинству, ведь при создании или модернизации конструкции не обойтись без познаний в данной категории. Состоит мотор из таких ключевых элементов:
- ротора;
- статора;
- коммутационного узла щеточно-коллекторного типа.
При подаче питания на ротор и статор, на каждом из них образовываются магнитные поля, которые взаимодействуют между собой. Это в свою очередь вызывает вращения у ротора.
Подача питания на этот компонент осуществляется с применением графитовых щеток, которые плотно прилегают к ламелям коллектора. Чтобы изменить направленность оборотов ротора, нужно поменять положение фаз напряжения на одном из двух элементов: статоре или роторе.
Обмотки этих приспособлений могут получать питание от источников, или подключаться друг к другу параллельно. Именно на основе этой особенности силовые агрегаты классифицируются на параллельные и последовательные. От этого зависит способ возбуждения медных обмоток.
Если говорить про коллекторные моторы последовательного типа, то именно они чаще всего применяются в бытовых электрических приборах. Это обусловливается тем, что именно такое возбуждение дает возможность получать самый устойчивый к перегрузкам мотор.
Регуляторы стандартные
Что касается данных компонентов, то они реализуются множеством способов. Первая и самая простая схема – тиристорная. Такая технология применяется в бытовых приборах: стиральных машинах, дрелях, шуруповертах, пылесосах, и др. С легкостью подключаются к сетям переменного тока, в том числе и бытового назначения.
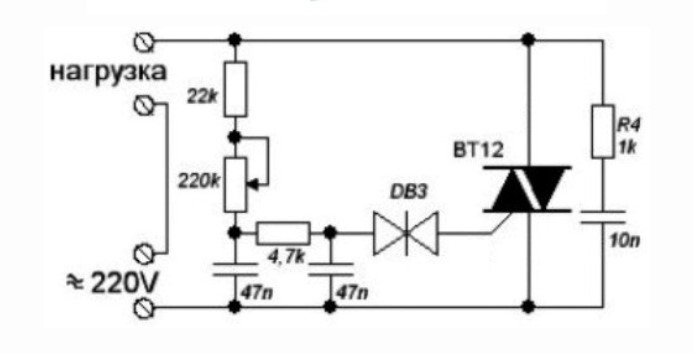
Стандартная схема
Работа этой схемы довольно простая: на всех участках сетевых токов, конденсатор получает ток при помощи резистора. Зарядка осуществляется до уровня открытия динистора, который подключен к регулирующим электродам сисмстора. После этого последний открывается и через него проходит ток к нагрузкам КД.
Схема дает возможность продуктивно регулировать время подзарядки конденсатора в управленческой цепи, а также определяя среднюю мощность напряжения, подаваемую на мотор.
Давайте упорядочим все шаги работы данной схемы. Вот они:
- подача тока к конденсатору от источника питания на 220 вольт;
- напряжение для пробоя динистора подается также, но уже через резистор переменного типа;
- непосредственно пробой;
- открытие симистора. Компонент работает непосредственно с показателями нагрузки;
- чем выше напряжение – тем чаще симистор открывается.
Данная технология обеспечивает простое, но в то же время эффективное регулирование интенсивности оборотов. Но, в то же время применение стандартной схемы не обеспечивает обратной связи, что также стоит учитывать при ее реализации. Исходя из этого, нужно также знать, что при изменении показателей нагрузки, параллельно будут нуждаться в настройке обороты мотора.
Схема симисторная
Этот механизм имеет много общих параметров с диммером, применяемом для регулирования уровня яркости ламп накалывания. Обратная связь также отсутствует. Реализовать реверс по току моно, но с применением вспомогательной электроники. Это делается для того, чтобы беспрепятственно удерживать мощность на заданных показателях, не допуская перегревов и перегрузок.
Реостатная схема
Относится к модифицированным схемам, но, несмотря на это, ее реализация также отличается простотой. С помощью получается стабилизировать обороты, а также рассеивать огромное количество вырабатываемого тепла. Регулировка осуществляется с помощью радиатора, который нужно заранее заготовить. Надо обеспечить и эффективный отвод тепла, что приводит к потерям энергии и, как следствие – коэффициента полезного действия. Для того чтобы предотвратить эти недостатки, рекомендуют применять активное охлаждение на постоянной основе.
Реостатная схема пример
Полученный регулятор ограничитель отличается своей эффективностью, при реализации смены числа оборотов двигателя. Также достичь производительности помогут силовые транзисторы, «отбирающие» определенную долю напряжения. Это обусловливается тем, что количество тока из сети 220В доходит до мотора в меньшем объеме, благодаря этому, силовой агрегат не сталкивается с большими нагрузками.
Интегральная
Стабилизация также относится к модифицированным схемам. Здесь в основе процесса регулирования лежит таймер интегрального действия. Его основная задача – контролировать уровни нагрузки на электродвигатель. Здесь также находят свое применение транзисторы. Особенность обусловливается микроконтроллером, входящим в состав системы, при этом, обладающим высокими параметрами выходного напряжения.
В ситуациях, когда имеет место нагрузка в 0,1 ампер, все токи поступают напрямую на плату, обходя транзисторы. Чтобы обеспечить эффективную работу регулятора, необходимо, чтобы на затворе было напряжение 12в. Следовательно, для слаженной работы, электрическая цепь и уровень напряжения в источнике питания должны соответствовать этому диапазону. Ресурс регулятора позволяет устанавливать компонент в мощных модификациях, для точного и быстрого регулирования их работы.
Интегральная схема
Самостоятельное создание регулятора
Заводские регуляторы представлены в широком ассортименте, как в интернете, так и обыкновенных магазинах. Но, если у вас нет желания приобретать готовый компонент и вы хотите собрать его самостоятельно – это реально осуществить. Чтобы задача была успешной – необходимо следовать алгоритму конструкции и иметь в наличии все необходимые компоненты.
Нам понадобятся:
- проводки;
- готовая схема;
- конденсаторные схемы;
- тиристор;
- резистор;
- паяльник.
Ориентируясь на схему компоновки, мощностной и оборотный регулятор будет отвечать за контроль первого полупериода. Самодельный стабилизатор имеет такой алгоритм работы (пример нашей модели):
- прибор, подключенный к стандартной сети питания на 220в, принимает ток на конденсатор;
- компонент сразу же срабатывает, после получения заряда;
- передача нагрузки к резисторам и нижним кабелям;
- соединение положительного конденсаторного контакта к тиристорному электроду;
- подача одного заряда напряжения на достаточном уровне;
- открытие второго полупроводника;
- конденсатор подает на тиристор нагрузку, он в свою очередь пропускает ее через себя;
- конденсатор разряжается;
- повторение полупериода;
Если мощность двигателя постоянного или переменного тока большая – регулятор обеспечивает экономную работу устройства. Для использования приспособления в своих бытовых, мощности и ресурса хватает. Но, когда нужно осуществлять регулирование оборотов без потери мощности и более крупных и производительных агрегатов, тогда стоит обратить внимание все же на заводские модификации. Несмотря на то, что такой вариант получится дороже, он обеспечит 100%-ю работоспособность и надежность.
А сейчас давайте рассмотрим другие, нестандартные, но довольно распространенные методы регулировки и стабилизации.
Способ 2
Здесь используется микросхема типа TDA 1085 со стандартной платой. Можно при желании создать собственную, «модернизировав» и изменив неподходящие элементы. К примеру, можно применять двухстороннюю печатную плату. Конденсаторные и резисторные детали могут применяться при поверхностном монтаже. Рекомендуется развести друг от друга низко- и высоковольтные цепи. А «земля» должна разводиться с учетом параметров микросхемы.
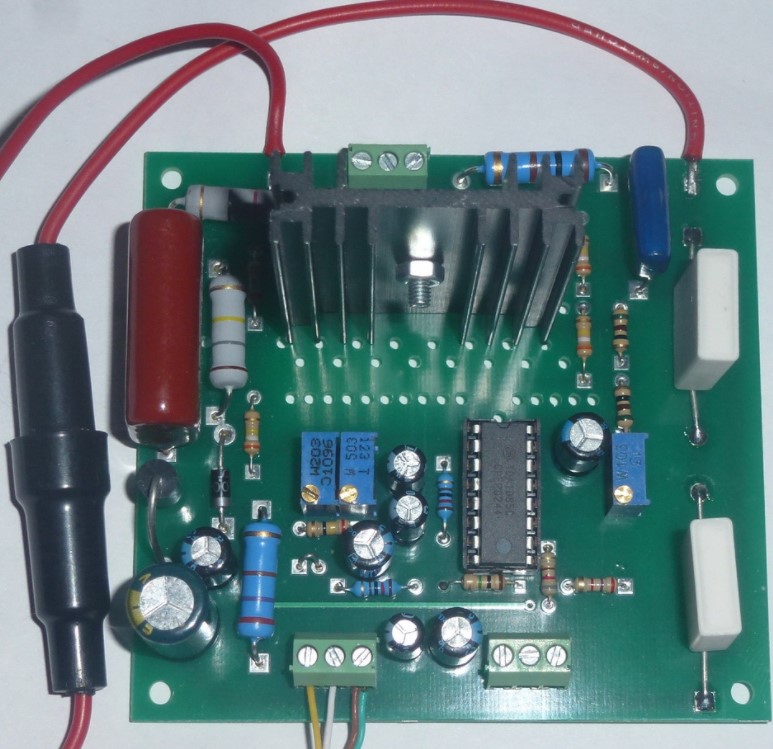
Пример собранной платы
В результате получается компактная двусторонняя плата, обеспечивающая точное регулирование.
Частотная регулировка
Для решения этой задачи применяются частотные преобразователи (драйверы, инверторы), которые присоединяются к прибору. Они обеспечивают выпрямление напряжения, поступающего от источника. Агрегаты внутри формируют напряжение и частоты на необходимых уровнях. Далее осуществляется подача этих параметров на эл двигатель.

Стабилизация коллекторного двигателя 12вВсе характеристики, необходимые для регулирования работы, частотник рассчитывает сам, ориентируясь на внутренние алгоритмы, которые установлены производителем.
Из преимуществ такого способа стоит выделить:
- быстрое достижение плавности регулировки частот оборотов электрического мотора;
- возможность изменения скоростей и направлений вращения моторов;
- требуемые параметры поддерживаются самостоятельно;
- экономические выгоды.
Из слабых сторон стоит выделить обязательность наличия преобразователя, который нужно приобретать отдельно. Но, справедливости ради отметим, что цена на частотники невысокая и они легко впишутся в бюджет любого дома, хозяйства, предприятия.
Изменение числа полюсов
Уменьшение или увеличение количества пар полюсов – еще один эффективный способ провести регулировку. Этот вариант особо актуален для моделей двигателей многоскоростного действия со сложными роторными обмотками. Данные элементы разделены на определенные группы и чередуются в процессе работы. Осуществляется это посредством коммутации, подключением последовательным или параллельным способом.
К преимуществам такого варианта регулировки относят:
- высокий КПД силового агрегата;
- требовательные механические выходные характеристики.
Стоимость реализации – одна из самых высоких, если сравнивать с другими технологиями. Вес и размеры готовой установки также немаленькие, что требует наличия свободного места для монтажа. Сам мониторинг оборотов осуществляется со ступенью в 1500 – 3000 оборотов в минуту.
Проведение регулирование в моторах АС
Устройства, работающие от переменного напряжения, также поддерживают регулирование оборотов. Рассмотрим вкратце основные способы такого управления, характерные для АС модификаций с фазными роторами.
При помощи напряжения
Для этого используются автотрансформаторы типа ЛАТР, которые осуществляют изменение напряжения на моторных обмотках. Таким образом производится и регулирование оборотов вала.
Метод является подходящим также и для вариаций с короткозамкнутыми роторами. Оператор имеет возможность проводить управление в пределах от минимальных до номинальных параметров двигателя.

Регулятор
Определение сопротивления
Переменное сопротивление реостата (или несколько таких явлений) реализуется непосредственно в цепи ротора. Оно воздействует на роторное поле и показатели тока, из-за чего получается изменять величины скольжения и точное число оборотов электродвигателя. Существует закономерность: чем уровень тока меньше, тем выше показатель скольжения двигателя и меньше скорость.
Преимущества:
- широкий диапазон регулирования оборотов электрического оборудования;
- сдержанные выходные характеристики машины.
К недостаткам относят:
- уменьшение продуктивности мотора;
- общее снижение рабочих параметров механизма.
Применение двойного питания
Здесь используются двигатели с двойным питанием, подающимся через вентильные приспособления. Основной упор делается на изменение показателей скольжения. При регулировании работы крупных специализированных машин, компонент подает и регулирует величину ЭДС (электродвижущей силы) на ротор от отдельно выбранных источников напряжения.
Вывод
При подаче напряжения у асинхронных моделей моторов наблюдаются рывки ротора. Это явление негативно влияет на работу, как самого агрегата, так и его привода. Именно поэтому, регулировка осуществляется по принципу плавного старта. Он обеспечивается такими факторами:
- старт посредством ЛАТР;
- разгон и работу мотора путем переключения обмоток по схемам треугольник/звезда;
- применение защитных устройств, например, частотного преобразователя.
Важно при регулировании оборотов не потерять в мощности. Применение вышеописанных методов позволит определить вращения без снижения продуктивности. Широкий выбор заводских моделей, но, можно реализовать деталь и самостоятельно.
Регистрация: 14.11.2008
Екатеринбург
Сообщений: 12
Есть торцовка Корвет-5 с 6000 оборотов и диск Ataka по алюминию, на самом диске написано max. 5000 об., на упаковке max. 5500. Как их совместить? Причем, в инструкции рекомендован для алюминия именно диск Ataka 255*30*100зубьев. Какие могут быть варианты понижения оборотов. И вообще, как замерить обороты на коллекторном двигателе? Нашел в интернете вот такую схему понижения оборотов. Насколько она применима в данном случае. Запустится ли движок, если просто понизить напряжение через автотрансформатор?

Коллекторный двигатель можно регулировать с помощью ЛАТРа вплоть до 0 об/мин. Только соответственно упадёт мощность.
Регистрация: 14.11.2008
Екатеринбург
Сообщений: 12
Спасибо, попробовал, получилось. Распустил 14 м профиля на маленькие кусочки  Правда у меня трансформатор еще дедовский, он до 200 только понижает, т.е. 10%. На сколько при этом падают обороты? Чем лучше воспользоваться для замера оборотов?
Правда у меня трансформатор еще дедовский, он до 200 только понижает, т.е. 10%. На сколько при этом падают обороты? Чем лучше воспользоваться для замера оборотов?
Регистрация: 12.09.2006
Москва
Сообщений: 3057
Видимо, зависимость между мощностью и током квадратичная. То есть если ток упал на 10%, мощность- на 20 (0,9*0,9=0,81)
Как зависит ток от напряжения у данного двигателя- трудно сказать… Будем считать- линейно 
Как связана мощность с оборотами? Думаю, напрямую…
Для измерения скорости вращения существуют механические тахометры. Приставил к торцу вала эл. двигателя вал тахометра, нажал на кнопочку он немного потикает и выдаст вам об/мин. Прибор похож на секундомер с торчащим из него валом. Это самый прстейший способ, а ещё есть стробоскопический и т.д. Но не заморачивайтесь зависимость почти прямопропорциональная напряжению. Регулировать можно также тиристорными регуляторами, но не любыми: во-первых надо учитывать мощность чтобы она соответствовала инструменту, во-вторых некоторые тиристорные регуляторы простейшие (типа указанного на вашей картинке) могут войти в автоколебательный режим и обороты будут дёргаться (это из опыта) так что надо пробовать. Успехов!
Регистрация: 17.01.2009
Харьков
Сообщений: 127
А зачем пилой пилить, не проще ли болгарку со стойкой использовать? Я себе Ферм 125мм болгарку сразу со стойкой купил, трубы режет только так. Хотя точность пониже чем у торцовки.
По поводу регулятора, мне тоже для лобзика нужно, вот думаю если просто купить кнопку со встроенной электроникой и колёсиком от какого-то инструмента и закрепить её в корпусе удленнителя? медленно нажимая получаем плавный пуск, колёсиком ограничиваем обороты, для работы уже есть фиксатор в кнопке, если чего можно быстро выключить ткнув в неё.
Регистрация: 14.11.2008
Екатеринбург
Сообщений: 12
Алюминий болгаркой не отпилить ровно — плавится и срез получается с наплывами 
Кнопки с регуляторами тоже искал, но они, в основном на маленькую мощность рассчитаны — 350 — 650 ватт. Для лобзика как раз подойдет, ищите по наименованию БУЭ 1
Регистрация: 06.11.2008
Москва
Сообщений: 368
Не очень то большое превышение скорости. Я бы забил на это. Тем более — под нагрузкой скорость падает.
Регистрация: 15.10.2006
Самара
Сообщений: 436
evgeha написал :
evgeha написал :
Коллекторный двигатель можно регулировать с помощью ЛАТРа вплоть до 0 об/мин. Только соответственно упадёт мощность.
Зависит от схемы возбуждения. Обмотку возбуждения лучше запитывать номинальным напряжением.
 Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
- Особенности регулирования скорости
- Обобщенная схема регулятора
- Разновидности коллекторных двигателей
- Конструкция мотора
- Выбор схемы
- Особенности конструкции
- Принцип управления
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Обобщенная схема регулятора
 Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
 Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
 Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
 При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
 Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
 Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
 Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
 Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
 Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.

Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения. Особенно вас должны интересовать схемы, которые работают без потери мощности
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Действие любого электродвигателя построено на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пустить по ней постоянный ток, то рамка станет поворачиваться. Направление вращения определяется согласно «правилу правой руки».
Эту закономерность можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку она вращается, для этого используются специальные скользящие контакты. После того, как рамка повернётся на 180 градусов, ток по этим контактам потечёт в обратном направлении. Таким образом, направление вращения останется прежним. При этом, плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Устройство

Коллекторный двигатель состоит обычно из ротора (якоря), статора, щёток и тахогенератора:
- Ротор — это вращающаяся часть, статор — это внешний магнит.
- Щётки, сделанные из графита – это основная часть скользящих контактов, через которую на вращающийся якорь подаётся напряжение.
- Тахогенератор – это прибор, который отслеживает характеристики вращения. В случае нарушения равномерности движения, он корректирует поступающее в двигатель напряжение, тем самым делая его более плавным.
- Статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также, вместо статических магнитов, здесь могут быть использованы и катушки электромагнитов. Работать такой мотор может как от постоянного, так и от переменного тока.
Простота регулировки скорости коллекторного двигателя определяется тем, что скорость вращения прямо зависит от величины поданного напряжения.
Кроме этого, важной особенностью является то, что ось вращения непосредственно можно присоединять к вращающемуся инструменты без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- Коллекторных двигателях постоянного тока.
- Коллекторных двигателях переменного тока.
В этом случае, речь идёт о том, каким именно током происходит питание электродвигателей.
Классификация может быть сделана также и по принципу возбуждения двигателя. В устройстве коллекторного двигателя, электрическое питание подаётся и на ротор и на статор двигателя (если в нём используются электромагниты).
Разница состоит в том, как организованы эти подключения.
Тут принято различать:
- Параллельное возбуждение.
- Последовательное возбуждение.
- Параллельно-последовательное возбуждение.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Регулировка
Теперь расскажем о том, как можно регулировать обороты коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то любые средства регулировки, которые способны выполнять эту функцию для этого вполне пригодны.
Перечислим несколько такого рода вариантов для примера:
- Лабораторный автотрансформатор (ЛАТР).
- Заводские платы регулировки, используемые в бытовых приборах (можно использовать в частности те, которые применяются в миксерах или в пылесосах).
- Кнопки, используемые в конструкции электроинструментах.
- Бытовые регуляторы освещения с плавным действием.
Однако, все вышеперечисленные способы имеют очень важный изъян. Вместе с уменьшением оборотов, одновременно уменьшается и мощность работы мотора. В некоторых случаях, его можно остановить даже просто рукой. В некоторых случаях, это может быть приемлемо, но большей частью, это является серьёзным препятствием.
Хорошим вариантом является выполнение регулировки оборотов посредством использования тахогенератора. Его обычно устанавливают на заводе. При отклонениях в скорости вращения мотора, через симисторы в мотор передаётся уже откорректированное электропитание, соответствующее требуемой скорости вращения. Если в эту схему встроить регулировку вращения мотора, то потери мощности здесь происходить не будет.
Как это выглядит конструктивно? Наиболее распространены реостатная регулировка вращения, и сделанная на основе использования полупроводников.
В первом случае, речь идёт о переменном сопротивлении с механической регулировкой. Она последовательно подключается к коллекторному электродвигателю. Недостатком является дополнительное выделение тепла и дополнительная трата ресурса аккумулятора. При таком способе регулировк, происходит потеря мощности вращения мотора. Является дешёвым решением. Не применяется для достаточно мощных моторов по упомянутым причинам.
Во втором случае, при использовании полупроводников, происходит управление мотором путём подачи определённых импульсов. Схема может менять длительность таких импульсов, что в свою очередь, меняет скорость вращения без потери мощности.
Регулятор оборотов электродвигателя 220в
Его можно изготовить совершенно самостоятельно, но для этого нужно будет изучить все возможные технические особенности прибора. По конструкции можно выделить сразу несколько разновидностей главных деталей. А именно:
- Сам электродвигатель.
- Микроконтроллерная система управления блока преобразования.
- Привод и механические детали, которые связаны с работой системы.
Перед самым началом запуска устройства, после подачи определённого напряжения на обмотки, начинается процесс вращения двигателя с максимальным показателем мощности. Именно такая особенность и будет отличать асинхронные устройства от остальных видов. Ко всему прочему происходит прибавление нагрузки от механизмов, которые приводят прибор в движение. В конечном счёте на начальном этапе работы устройства мощность, а также потребляемый ток лишь возрастают до максимальной отметки.
В это время происходит процесс выделения наибольшего количества тепла. Происходит перегрев в обмотках, а также в проводах. Использование частичного преобразования поможет не допустить этого. Если произвести установку плавного пуска, то до максимальной отметки скорости (которая также может регулироваться оборудованием и может быть не 1500 оборотов за минуту, а всего лишь 1000) двигатель начнёт разгоняться не в первый момент работы, а на протяжении последующих 10 секунд (при этом на каждую секунду устройство будет прибавлять по 100−150 оборотов). В это время процесс нагрузки на все механизмы и провода начинает уменьшаться в несколько раз.
Читать также: Вышка для работы на высоте
Как сделать регулятор своими руками
Можно совершенно самостоятельно создать регулятор оборотов электродвигателя около 12 В. Для этого стоит использовать переключатель сразу нескольких положений, а также специальный проволочный резистор. При помощи последнего происходит изменение уровня напряжения питания (а вместе с этим и показателя частоты вращения). Такие же системы можно применять и для совершения асинхронных движений, но они будут менее эффективными.
Ещё много лет назад широко использовались механические регуляторы — они были построены на основе шестеренчатых приводов или же их вариаторов. Но такие устройства считались не очень надёжными. Электронные средства показывали себя в несколько раз лучше, так как они были не такими большими и позволяли совершать настройку более тонкого привода.
Для того чтобы создать регулятор вращения электродвигателя, стоит использовать сразу несколько устройств, которые можно либо купить в любом строительном магазине, либо снять со старых инвенторных устройств. Чтобы совершить процесс регулировки, стоит включить специальную схему переменного резистора. С его помощью происходит процесс изменения амплитуды входящего на резистор сигнала.
Внедрение системы управления
Чтобы значительно улучшить характеристику даже самого простого оборудования, стоит в схему регулятора оборотов двигателя подключить микроконтроллерное управление. Для этого стоит выбрать тот процессор, в котором есть подходящее количество входов и выходов соответственно: для совершения подключения датчиков, кнопок, а также специальных электронных ключей.
Для осуществления экспериментов стоит использовать особенный микроконтроллер AtMega 128 — это наиболее простой в применении и широко используемый контроллер. В свободном использовании можно найти большое число схем с его применением. Чтобы устройство совершало правильную работу, в него стоит записать определённый алгоритм действий — отклики на определённые движения. К примеру, при достижении температуры в 60 градусов Цельсия (замер будет отмечаться на графике самого устройства), должно произойти автоматическое отключение работы устройства.
Регулировка работы
Теперь стоит поговорить о том, как можно осуществить регулировку оборотов в коллекторном двигателе. В связи с тем, что общая скорость вращения мотора может напрямую зависеть от величины подаваемого уровня напряжения, для этого вполне пригодны совершенно любые системы для регулировки, которые могут осуществлять такую функцию.
Стоит перечислить несколько разновидностей приборов:
- Лабораторные автотрансформеры (ЛАТР).
- Заводские платы регулировки, которые применяются в бытовых устройствах (можно взять даже те, которые используются в пылесосах, миксерах).
- Кнопки, которые применяются в конструкции электроинструментов.
- Бытовые разновидности регуляторов, которые оснащены особым плавным действием.
Но при этом все такие способы имеют определённый изъян. Совместно с процессами уменьшения оборотов уменьшается и общая мощность работы мотора. Иногда его можно остановить, даже просто дотронувшись рукой. В некоторых случаях это может быть вполне нормальным, но по большей части это считается серьёзной проблемой.
Наиболее приемлемым вариантом станет выполнение функции регулировки оборотов при помощи применения тахогенератора.
Его чаще всего устанавливают на заводе. Во время отклонения скорости вращения моторов через симистры в моторе будет происходить передача уже откорректированного электропитания, сопутствующего нужной скорости вращения. Если в такую ёмкость будет встроена регулировка вращения самого мотора, то мощность не будет потеряна.
Как же это выглядит в виде конструкции? Больше всего используется именно реостатная регулировка процесса вращения, которая создана на основе применения полупроводника.
В первом случае речь пойдёт о переменном сопротивлении с использованием механического процесса регулировки. Она будет последовательно подключена к коллекторному электродвигателю. Недостатком в этом случае станет дополнительное выделение некоторого количества тепла и дополнительная трата ресурса всего аккумулятора. Во время такой регулировки происходит общая потеря мощности в процессе совершения вращения мотора. Он считается наиболее экономичным вариантом. Не используется для довольно мощных моторов по вышеуказанным причинам.
Во втором случае во время применения полупроводников происходит процесс управления мотором при помощи подачи определённого числа импульсов. Схема способна совершать изменение длительности таких импульсов, что, в свою очередь, будет изменять общую скорость вращения мотора без потери показателя мощности.
Если вы не хотите самостоятельно изготавливать оборудование, а хотите купить уже полностью готовое к применению устройство, то стоит обратить особое внимание на главные параметры и характеристики, такие, как мощность, тип системы управления прибором, напряжение в устройстве, частоту, а также напряжение рабочего типа. Лучше всего будет производить расчёт общих характеристик всего механизма, в котором стоит применять регулятор общего напряжения двигателя. Стоит обязательно помнить, что нужно производить сопоставление с параметрами частотного преобразователя.
Прекрасный для самоделок мотор от стиральной машины имеет слишком высокие обороты, и малый ресурс на максимальных оборотах. Поэтому я применяю простой самодельный регулятор оборотов (без потери мощности). Схема опробована и показала прекрасный результат. Обороты регулируются примерно от 600 до max.

Потенциометр электрически изолирован от сети, что повышает безопасность пользования регулятором.
Симистор необходимо поставить на радиатор.
Оптопара (2 шт) практически любая, но EL814 имеет внутри 2 встречных светодиода, и просится в эту схему.
Читать также: Металлическая губка для очистки жала
Высоковольтный транзистор можно поставить, например, IRF740 (от БП компьютера), но жалко такой мощный транзистор ставить в слаботочную цепь. Хорошо работают транзисторы 1N60, 13003, КТ940.
Вместо моста КЦ407 вполне подойдет мост из 1N4007, или любой на >300V, и ток >100mA.
Печатка в формате .lay5. Печатка нарисована «Вид со стороны М2 (пайка)», так что при выводе на принтер ее надо зеркалить. Цвет М2 = черный, фон = белый, остальные цвета не печатать. Контур платы (для обрезки) выполнен на стороне М2, и будет указателем границ платы после травления. Перед запайкой деталей его следует удалить. В печатку добавлен рисунок деталей со стороны монтажа для переноса на печатку. Она тогда приобретает красивый и законченный вид.
Регулировка от 600 оборотов подходит для большинства самоделок, но для особых случаев предлагается схема с германиевым транзистором. Минимальные обороты удалось снизить до 200.

Минимальные обороты получил 200 об/мин (170-210, электронный тахометр на низких оборотах плохо меряет), транзистор Т3 поставил ГТ309, он прямой проводимости,и их много. Если поставить МП39, 40, 41, П13, 14, 15, то обороты должны еще снизиться, но уже не вижу надобности. Главное, что таких транзисторов как грязи, в отличие от МП37 (смотри форум).
Плавный пуск прекрасно работает, Правда на валу мотора пусто, но от нагрузки на валу при пуске, подберу R5 при необходимости.
R5 = 0-3к3 в зависимости от нагрузки;; R6 = 18 Ом – 51 Ом – в зависимости от симистора, у меня сейчас этого резистора нет;; R4 = 3к – 10к – защита Т3;; RР1 = 2к-10к – регулятор скорости, связан с сетью, защита от сетевого напряжения оператора обязательна. Есть потенциометры с пластмассовой осью, желательно использовать. Это большой недостаток данной схемы, и если нет большой необходимости в малых оборотах, советую использовать V17 (от 600 об/мин).
С2 = плавный пуск, = время задержки включения мотора;; R5 = заряд С2, = наклон кривой заряда, = время разгона мотора;; R7 – время разряда С2 для следующего цикла плавного пуска (при 51к это примерно 2-3 сек)
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.
Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения.
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Действие любого электродвигателя построено на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пустить по ней постоянный ток, то рамка станет поворачиваться. Направление вращения определяется согласно «правилу правой руки».
Эту закономерность можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку она вращается, для этого используются специальные скользящие контакты. После того, как рамка повернётся на 180 градусов, ток по этим контактам потечёт в обратном направлении. Таким образом, направление вращения останется прежним. При этом, плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Как изготовить своими руками?
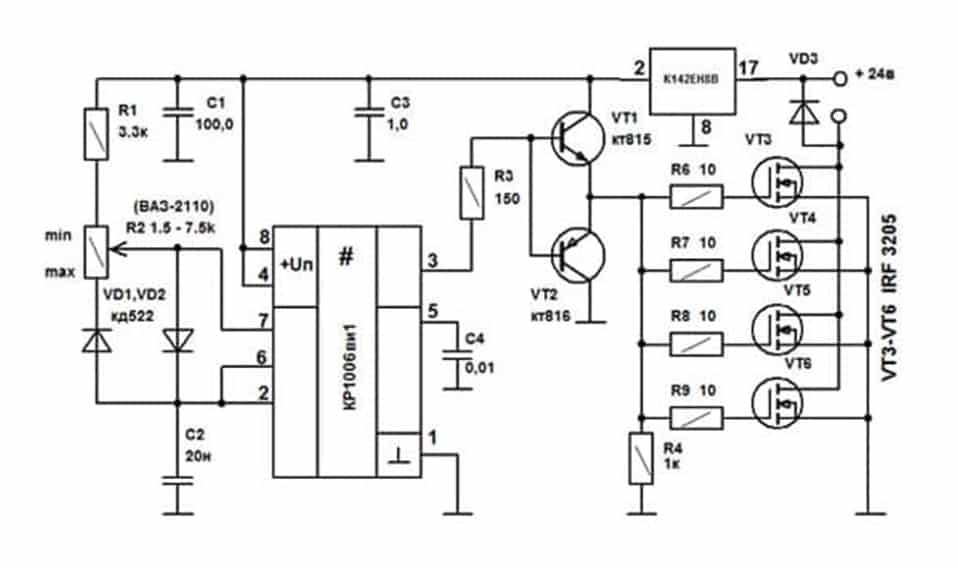
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
Вот схема его работы:

Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При изменении силы тока, эта частота может изменяться между 3 кГц и 5 кГц. Переменный резистор R2 служит для регулировки тока. При использовании электродвигателя в бытовых условиях, рекомендуется использовать регулятор стандартного типа.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:
На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева. При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:

При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи.Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Критерии выбора и соимость
Для того, чтобы правильно выбрать наиболее подходящий тип регулятора, нужно хорошо представлять себе, какие есть разновидности таких устройств:
- Различные типы управления. Может быть векторная или скалярная система управления. Первые применяются чаще, а вторые считаются более надёжными.
- Мощность регулятора должна соответствовать максимально возможной мощности мотора.
- По напряжению удобно выбирать устройство, имеющее наиболее универсальные свойства.
- Характеристики по частоте. Регулятор, который вам подходит, должен соответствовать наиболее высокой частоте, которую использует мотор.
- Другие характеристики. Здесь речь идёт о величине гарантийного срока, размерах и других характеристиках.
В зависимости от назначения и потребительских свойств, цены на регуляторы могут существенно различаться.
Большей частью они находятся в диапазоне примерно от 3,5 тысяч рублей до 9 тысяч:
- Регулятор оборотов KA-18 ESC, предназначенный для моделей масштаба 1:10. Стоит 6890 рублей.
- Регулятор оборотов MEGA коллекторный (влагозащищенный). Стоит 3605 рублей.
- Регулятор оборотов для моделей LaTrax 1:18. Его цена 5690 рублей.
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Простейший регулятор оборотов электродвигателя своими руками
Изготавливая различные самоделки, приходится сталкиваться с рядом проблем и поиском их решений. Так и в случае с различными приспособлениями, которые имеют в своей конструкции коллекторный электродвигатель.
Очень часто нужно сделать так, чтобы двигатель имел регулируемые обороты. Для этих целей используется регулятор (контроллер) оборотов двигателя, который можно собрать своими руками.
Представленный ниже регулятор для электродвигателей позволяет не только обеспечить плавный пуск мотора и степень регулировки оборотов, но и защитить двигатель от перегрузок. Работать контроллер может не только от 220 Вольт, но и от пониженного напряжения, вплоть от 110 Вольт.
Характеристики самодельного контроллера
- Диапазон напряжений (110-240 Вольт);
- Возможность регулировки оборотов электродвигателя, от 9-99%;
- Нагрузка, до 2,5 кВт;
- Рабочая мощность, не более 300 Вт.
Самодельный регулятор оборотов для электродвигателя имеет низкий уровень шума, он позволяет осуществлять плавную стабилизацию оборотов и осуществлять мягкий пуск электродвигателя.
Ниже будет представлена схема регулятора оборотов для электродвигателя и принцип его работы.
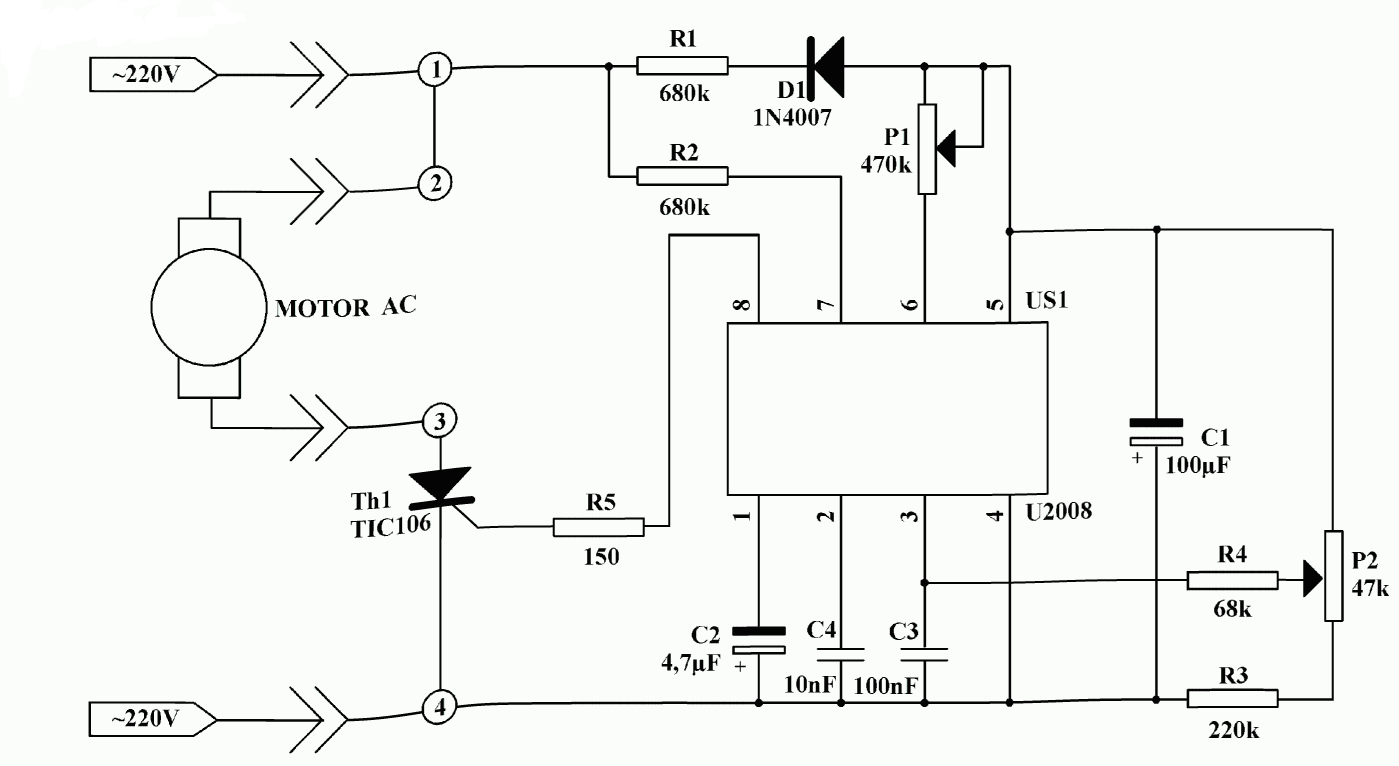
Схема регулятора оборотов для электродвигателя
Чтобы собрать регулятор оборотов для двигателя потребуется генератор ШИМ импульсов и симистор для управления двигателем. Диод и резистор D1 и R1, позволяют снижать напряжение для питания двигателя, а конденсатор C1, призван обеспечивать фильтрацию тока на входе электроцепи.
Элементы P1, R5 и R3 — это делители напряжения с возможностью регулировки его значений. Резистор R2, который указан на схеме регулятора оборотов электродвигателя, позволяет синхронизировать внутренние блоки регулятора с основным симистором (ВТ139), на котором собственно и работает регулятор оборотов.
Ниже на рисунке можно увидеть наглядное расположение всех элементов регулятора оборотов для электродвигателей. Обязательно следует безопасно расположить элементы, так как работа регулятора осуществляется от опасного напряжения в 220 Вольт.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
![]()
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.

Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Мощность и нагрузка регулятора оборотов
К самодельному регулятору оборотов двигателя, сделанному по выше представленной схеме, можно подключить нагрузку не более 2 кВт. В случае увеличения нагрузки осуществляется замена главного симистора BT138/800. Если симистор устанавливается большего номинала, то его рекомендуется вынести за пределы общей платы, и обязательно установить на радиатор охлаждения, который можно сделать из куска алюминиевой полосы.
Примечательно то, что подобный регулятор можно использовать не только с электродвигателями, но и с лампами освещения. Таким образом, дёшево и сердито, можно собрать регулятор для яркости ламп освещения.
Подписывайтесь на мой канал в Дзен. Всем удачи, и мирного неба над головой!
Источник
Изменение оборотов асинхронного двигателя. Разбор способов регулирования.
Благодаря своей простоте исполнения, относительной дешевизне и надежности трехфазные двигатели широко используются в хозяйстве и производстве. Во многих исполнительных механизмах применяют всевозможные типы асинхронных двигателей . Для широкого спектра применения АД, необходимо изменять и регулировать скорость вращения вала двигателя. Регулировка скорости АД производят несколькими способами. Их мы сейчас и рассмотрим.
- Механические регулирование. Путем изменения передаточного числа в редукторах.
- Электрическое регулирование. Изменением нескольких параметров питающего напряжения.
Рассмотрим электрическое изменение скорости АД, как более точный и распространённый способ регулирования.
Управление электрическими параметрами позволяет производить плавный запуск двигателя, поддерживать заданные параметры скорости или момента асинхронного мотора.
Параметры с помощью которых управляют мотором:
- Частотой тока питающей сети.
- Величиной тока в цепях мотора.
- Напряжением на двигателе.
Самым распространённым асинхронным двигателем является мотор беличье колесо, двигатель с короткозамкнутым ротором. Для управления вращением, в этом типе электрических машин, применяют несколько видов воздействия.
- Изменение частоты поля статора.
- Управление величиной скольжения, изменяя напряжение питания.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:

Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Регулирование частотой
Специальные устройства, преобразователи частоты (другие названия инвертор, частотник, драйвер), подключаются к электрической машине. Путем выпрямления напряжения питания, преобразователь частоты внутри себя формирует необходимые величины частоты и напряжения, и подает их на электрический двигатель.
Необходимые параметры для управления АД преобразователь рассчитывает самостоятельно, согласно внутренним алгоритмам, запрограммированным производителем устройства.
Преимущества регулирование частотой
.
- Достигается плавное регулирование частоты вращения электромотора.
- Изменение скорости и направление вращения двигателя.
- Автоматическое поддержание требуемых параметров.
- Экономичность системы управления.
Единственный недостаток, с которым можно смирится, это необходимость в приобретении частотника. Цены на такие устройства совсем незаоблачные, и в пределах 150 уе, можно обзавестись преобразователем для 2 кВт двигателя.
Структура частотного регулятора
В настоящее время детально разработаны и широко применяются две основные топологии многоуровневых частотных преобразователей. Это каскадные и преобразователи на базе многоуровневых частотных инверторов напряжения.
Рис. №3 Структурная схема частотного преобразователя многоуровневого типа высокого напряжения, построенная на базе IGBT-транзисторов с воздушным или водяным охлаждением.
В состав устройства включен многообмоточный трансформатор. К особенностям схемы относится наличие силовых ячеек с последовательным соединением, благодаря чему на выходе устройства получается суммарное высокое напряжение. Подобная схема служит для получения формы выходного напряжения практически приближенной к идеальному синусу. Наличие шунтируемых в момент неисправности ячеек обуславливает высокую надежность схемы.
Как продолжение предыдущей схемы рассмотрим схему преобразователя на базе трансформаторного многоуровневого инвертора напряжения с широтно-импульсной модуляцией с применением IGBT-модулей. Для устройства характерна фиксированная частота ШИМ – 3кГц. В структуру устройства включены система защиты с использованием микропроцессора.
Рис. 4 Структурная схема преобразователя.
На схеме видно, что все блоки функционально взаимосвязаны. На схеме показано как работает частотный регулятор для асинхронного двигателя, устройство и принцип работы.
В первом блоке находится входной трансформатор, в блоке осуществляется передача электроэнергии от трехфазного высоковольтного источника питания. От многоуровневого трансформатора производится распределение пониженного напряжения в шкаф инвертора на многоуровневый инвертор.
Шкаф инвертора включает в состав многоуровневый трехфазный инвертор, состоящий из ячеек – преобразователей. В каждой находится шестиимпульсный фильтр для выпрямления звена постоянного тока и мостовой инвертор напряжения на IGBT-транзисторах. По схеме происходит выпрямление входного переменного тока, который благодаря инвертору изменяется в переменный ток, обладающий регулируемыми показателями частоты и напряжения.
В шкафу защиты управления находятся микропроцессорный блок, обладающий многофункциональными возможностями и системой питания от ТСН преобразователя, устройство ввода преобразователя и первичные сенсоры, обозначающие режимы работы преобразователя.
Микропроцессор служит для формирования сигналов управления инвертором в зависимости от обозначенного алгоритма работы. Он служит для обработки сведений, собранных с датчиков напряжения и тока. Микропроцессор формирует сигналы для управления защитами и аварийными кнопками управления, корректирует алгоритм управления.
Для передачи сведений и связи используется оптоволоконный кабель. Для бесперебойной работы имеется независимый встроенный источник питания. Редактирование параметров выполняется пультом дистанционного управления.
Для надежного отключения и безопасного проведения различного рода работ преобразователь оборудован линейным разъединителем.
Рис. №5 Обобщенная схема ячейки преобразователя
Источники управляемого переменного напряжения формируют фазу напряжения для выполнения их последовательного соединения. Выходная схема питающей сети асинхронного двигателя происходит по схеме соединения обмоток «Звезда». Напряжение в трехфазном инверторе распределяется по схеме.
Рис. №6 Схема распределения напряжения в инверторе на три фазы.
Регулирование оборотов изменением числа пар полюсов
Специальные многоскоростные двигатели со сложной обмоткой регулируются путем изменения количества активных полюсов на статоре. Обмотки полюсов разбиты на группы, и чередуются, путем коммутации обмотки подключаются, то параллельно, то последовательно.
Положительные моменты данного способа.
- Высокий КПД мотора.
- Жесткие механические выходные параметры.
К недостаткам такого управления, можно отнести высокую стоимость электрической машин, а также значительный вес и габариты такого двигателя. Изменение оборотов происходит ступенькой 1500-3000 об/мин.
Асинхронные двигатели с фазным ротором
Основной способ управления АД с фазным ротором — изменение величины скольжения между статором и ротором.
Регулирование с помощью напряжения
Через специальные автотрансформаторы ЛАТР, путем изменения напряжения на обмотках двигателя, производят регулировку оборотов вала.
Данный способ так же подходит и к АД с короткозамкнутым ротором.
Таким способ можно регулировать в пределах от минимума до номинальных параметров двигателя.
Установка активного сопротивления в цепи ротора
Переменное реостатное сопротивление или набор сопротивлений в цепи ротора воздействует на ток и поле ротора. Изменяя таким образом величину скольжения и количество оборотов двигателя.
Чем больше сопротивление, тем меньше ток, тем больше величина скольжения АД и меньше скорость.
Достоинства такого регулирования.
- Большой диапазон регулирования оборотами электрической машины.
- Мягкая выходная характеристика мотора.
Недостатки такого способа.
- Уменьшение КПД двигателя.
- Ухудшение рабочих характеристик механизма.
Однофазные преобразователи частоты
Однофазные асинхронные электродвигатели широко применяются в качестве приводов насосных агрегатов, вентиляторов, маломощных станков. Для регулирования частоты вращения этих электрических машин применяются 2 основных способа:
- Изменение величины напряжения питания.
- Изменение частоты питающего напряжения.
Для регулирования питающего напряжения применяются трансформаторные, автотрансформаторные, тиристорные, симисторные и транзисторные преобразователи. Изменение частоты вращения путем регулирования напряжения имеет ряд серьезных недостатков:
- Увеличение скольжения и сильный нагрев обмоток статора.
- Узкий диапазон регулирования.
Кроме того, постоянная составляющая питающего напряжения на выходе тиристорных и симисторных устройств вызывает увеличение шума при работе, рывки и другие нежелательные явления.
Частотное регулирование лишено этих недостатков. Однофазные ПЧ применяются в холодильном оборудовании, системах вентиляции, бытовых насосах.
Такие электроприводы обеспечивают:
- Стабильную работу однофазного двигателя при любой частоте вращения.
- Снижение потребления электроэнергии.
- Возможность автоматической регулировки частоты вращения с обратной связью по изменению одного или нескольких технологических параметров.
- Удаленное управление и контроль характеристик.
- Защиту от ненормальных режимов работы и коротких замыканий.
- Интеллектуальное управление электродвигателем в соответствии с заданным алгоритмом.
- Возможность пуска без фазосдвигающего элемента.
- Поддержание необходимого момента на валу во всем диапазоне изменения скорости.
Эпилог
При всех своих достоинствах асинхронные машины имеют существенный недостаток, это рывок ротора при подаче напряжения. Такие режимы опасны как для самого двигателя, так и для приводных механизмов. Поскольку во время пуска АД, ток в обмотках двигателя приравнивается к короткому замыканию. А рывок вала разбивает подшипники, шлицы, передаточные устройства. Поэтому пуск АД стараются производить плавным стартом. А именно:
- Запуск через ЛАТР.
- Разгон и работа АД, через переключение обмоток двигателя звезда-треугольник.
- Использование устройств управления, таких как частотный преобразователь.
Источник
Виды двигателей
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Сложности при ШИМ регулировании скорости двигателя постоянного тока
ШИМ является популярным методом регулирования аналоговым напряжением в различных схемах. При использовании этого способа регулирования пользователь может столкнуться с непредсказуемым поведением двигателя. Например, вал может начать вращение в обратную сторону. Это происходит при низких емкостных нагрузках. В коллекторных двигателях в процессе работы происходит постоянное переключение обмоток якоря. Когда подключают регулятор, начинает происходить отключение и включение питание с определенной частотой. Дополнительная коммутация в сочетании с коллекторной может привести к проблемам с эксплуатацией двигателя. Поэтому устройства управления с ШИМ регулированием двигателя должны быть тщательно продуманы и проработаны.
Также причиной нестабильной работы электродвигателя может стать факт влияния силы тока на скорость вращения ротора, которая находится в зависимости от уровня приложенного напряжения. Проблемы могут возникнуть при эксплуатации двигателей на малой скорости по отношению к номинальному значению.
Например, у пользователя есть двигатель, который при номинальном напряжение вращает ротор со скоростью 10об/сек. Чтобы понизить скорость до 1 об/сек недостаточно просто снизить напряжение до 1В. Подобрать подходящее значение подаваемого напряжения сложно и если пользователю и удастся, то при незначительном изменении условий эксплуатации скорость снова изменится.
Решением проблемы является применение системы автоматического регулирования или кратковременное включение электродвигателя на полную мощность. Движение ротора будет происходить рывками, но при правильно подобранной частоте и длительности подаваемых импульсов можно сделать вращение более стабильным. Так, добиваются устойчивого движения вала электродвигателя с любой скоростью, которая не будет меняться в зависимости от нагрузки.
Регулировка оборотов электродвигателя 220В, 12В и 24В
Для плавности увеличения и уменьшения скорости вращения вала существует специальный прибор – регулятор оборотов электродвигателя 220в. Стабильная эксплуатация, отсутствие перебоев напряжения, долгий срок службы – преимущества использования регулятора оборотов двигателя на 220, 12 и 24 вольт.
Способы изменения вращения зависят от модели электрической машины. Характеристики электрических машин отличаются: постоянного и переменного тока, однофазные, трехфазные. Поэтому говорить нужно о каждом случае отдельно.
Простейший вариант
Легче всего изменять обороты электродвигателя постоянного тока. Они меняются простым изменением напряжения питания. Причем неважно где: на якоре или на возбуждении, но это касается только маломощных машин с минимальной нагрузкой. В основном управление скоростью вращения производят по цепи якоря. Более того, здесь возможно реостатное регулирование, если мощность мотора небольшая, или есть довольно мощный реостат.
Это самый неэкономичный вариант. Механические характеристики двигателя с независимым возбуждением самые невыгодные из-за больших потерь, результатом чего является падение механической мощности, КПД.
Еще одна возможность – введение реостата в обмотку возбуждения. Рассматривая характеристики двигателя с независимым возбуждением, увидим, что регулирование скорости вращения возможно только в сторону увеличения оборотов. Это происходит ввиду насыщения обмотки.
Итак, реостатное регулирование скорости вращения аппарата независимого возбуждения оправдано в системах с минимальной нагрузкой. Лучше всего, когда работа при таком включении буде периодической.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки
В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
В цепи якоря
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.

В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.
Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
![]()
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Есть еще один вариант, только это уже не для 12, а для 24в питания.

Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
Схема управления коллекторным двигателем постоянного тока
Простую схему управления двигателем постоянного тока можно собирать из полевого транзистора. Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
ШИМ сигнал характеризуют коэффициентом заполнения, который равен обратной величие скважности. Коэффициент заполнения равен отношению продолжительности импульса к периоду его подачи
Скорость движения вала двигателя будет пропорциональна значению коэффициента заполнения. Поэтому, если частота ШИМ сигнала слишком низкая для обеспечения стабильной работы, то вал двигателя будет вращаться заметными рывками. Чтобы гарантировать плавное регулирование и стабильную работу частота должна превышать сотни герц.
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.
Схема контроллера на симисторе содержит минимум деталей, изображенных на рисунке, где С1 – конденсатор, R1 – первый резистор, R2 – второй резистор.
С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.
Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.
В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами. Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости. Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились.
КПД
Преобразователи на электронных ключах
Тиристорные регуляторы мощности являются одними из самых распространенных, обладающие простой схемой работы.

Тиристор, работает в сети переменного тока.
Отдельным видом является стабилизатор напряжения переменного тока. Стабилизатор содержит трансформатор с многочисленными обмотками.

Схема стабилизатора постоянного тока

Зарядное устройство 24 вольт на тиристоре
Принцип действия заключаются в заряде конденсатора и запертом тиристоре, а при достижении конденсатором напряжения, тиристор посылает ток на нагрузку.
Процесс пропорциональных сигналов
Сигналы, поступающие на вход системы, образуют обратную связь. Подробнее рассмотрим с помощью микросхемы.

Микросхема TDA 1085
Микросхема TDA 1085, изображенная выше, обеспечивает управление электродвигателем 12в, 24в обратной связью без потерь мощности. Обязательным является содержание таходатчика, обеспечивающего обратную связь двигателя с платой регулирования. Сигнал стаходатчика идёт на микросхему, которая передаёт силовым элементам задачу – добавить напряжение на мотор. При нагрузке на вал, плата прибавляет напряжение, а мощность увеличивается. Отпуская вал, напряжение уменьшается. Обороты будут постоянными, а силовой момент не изменится. Частота управляется в большом диапазоне. Такой двигатель 12, 24 вольт устанавливается в стиральные машины.
Своими руками можно сделать прибор для гриндера, токарного станка по дереву, точила, бетономешалки, соломорезки, газонокосилки, дровокола и многого другого.
Промышленные регуляторы, состоящие из контроллеров 12, 24 вольт, заливаются смолой, поэтому ремонту не подлежат. Поэтому часто изготавливается прибор 12в самостоятельно. Несложный вариант с использованием микросхемы U2008B. В регуляторе используется обратная связь по току или плавный пуск. В случае использования последнего необходимы элементы C1, R4, перемычка X1 не нужна, а при обратной связи наоборот.
При сборе регулятора правильно выбирать резистор. Так как при большом резисторе, на старте могут быть рывки, а при маленьком резисторе компенсация будет недостаточной.
Важно! При регулировке контроллера мощности нужно помнить, что все детали устройства подключены к сети переменного тока, поэтому необходимо соблюдать меры безопасности!
Регуляторы оборотов вращения однофазных и трехфазных двигателей 24, 12 вольт представляют собой функциональное и ценное устройство, как в быту, так и в промышленности.
Регулирование скорости с помощью изменения частоты питания
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
При использовании электродвигателя в инструментах, одной из серьёзных проблем является регулировка скорости их вращения. Если скорость недостаточно высока, то действие инструмента является недостаточно эффективным.

- Устройство ↓
- Регулировка ↓
- Как изготовить своими руками? ↓
- Критерии выбора и соимость ↓
Если же она излишне высока, то это приводит не только к существенному перерасходу электрической энергии, но и к возможному пережогу инструмента. При слишком высокой скорости вращения, работа инструмента может стать также менее предсказуемой. Как это исправить? Для этой цели принято использовать специальный регулятор скорости вращения. Особенно вас должны интересовать схемы, которые работают без потери мощности
Двигатель для электроинструментов и бытовой техники обычно относится к одному из 2 основных типов:
- Коллекторные двигатели.
- Асинхронные двигатели.
В прошлом, вторая из указанных категорий имела наибольшее распространение. Сейчас, примерно 85% двигателей, которые употребляются в электрических инструментах, бытовой или кухонной технике, относятся к коллекторному типу. Объясняется это тем, что они имеют большую степень компактности, они мощнее и процесс управления ими является более простым.
Действие любого электродвигателя построено на очень простом принципе: если между полюсами магнита поместить прямоугольную рамку, которая может вращаться вокруг своей оси, и пустить по ней постоянный ток, то рамка станет поворачиваться. Направление вращения определяется согласно «правилу правой руки».
Эту закономерность можно использовать для работы коллекторного двигателя.
Важным моментом здесь является подключение тока к этой рамке. Поскольку она вращается, для этого используются специальные скользящие контакты. После того, как рамка повернётся на 180 градусов, ток по этим контактам потечёт в обратном направлении. Таким образом, направление вращения останется прежним. При этом, плавного вращения не получится. Для достижения такого эффекта принято использовать несколько десятков рамок.
Устройство

Коллекторный двигатель состоит обычно из ротора (якоря), статора, щёток и тахогенератора:
- Ротор — это вращающаяся часть, статор — это внешний магнит.
- Щётки, сделанные из графита – это основная часть скользящих контактов, через которую на вращающийся якорь подаётся напряжение.
- Тахогенератор – это прибор, который отслеживает характеристики вращения. В случае нарушения равномерности движения, он корректирует поступающее в двигатель напряжение, тем самым делая его более плавным.
- Статор может содержать не один магнит, а, например, 2 (2 пары полюсов). Также, вместо статических магнитов, здесь могут быть использованы и катушки электромагнитов. Работать такой мотор может как от постоянного, так и от переменного тока.
Простота регулировки скорости коллекторного двигателя определяется тем, что скорость вращения прямо зависит от величины поданного напряжения.
Кроме этого, важной особенностью является то, что ось вращения непосредственно можно присоединять к вращающемуся инструменты без использования промежуточных механизмов.
Если говорить об их классификации, то можно говорить о:
- Коллекторных двигателях постоянного тока.
- Коллекторных двигателях переменного тока.
В этом случае, речь идёт о том, каким именно током происходит питание электродвигателей.
Классификация может быть сделана также и по принципу возбуждения двигателя. В устройстве коллекторного двигателя, электрическое питание подаётся и на ротор и на статор двигателя (если в нём используются электромагниты).
Разница состоит в том, как организованы эти подключения.
Тут принято различать:
- Параллельное возбуждение.
- Последовательное возбуждение.
- Параллельно-последовательное возбуждение.
Регулировка
 Теперь расскажем о том, как можно регулировать обороты коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то любые средства регулировки, которые способны выполнять эту функцию для этого вполне пригодны.
Теперь расскажем о том, как можно регулировать обороты коллекторных двигателей. В связи с тем, что скорость вращения мотора просто зависит от величины подаваемого напряжения, то любые средства регулировки, которые способны выполнять эту функцию для этого вполне пригодны.
Перечислим несколько такого рода вариантов для примера:
- Лабораторный автотрансформатор (ЛАТР).
- Заводские платы регулировки, используемые в бытовых приборах (можно использовать в частности те, которые применяются в миксерах или в пылесосах).
- Кнопки, используемые в конструкции электроинструментах.
- Бытовые регуляторы освещения с плавным действием.
Однако, все вышеперечисленные способы имеют очень важный изъян. Вместе с уменьшением оборотов, одновременно уменьшается и мощность работы мотора. В некоторых случаях, его можно остановить даже просто рукой. В некоторых случаях, это может быть приемлемо, но большей частью, это является серьёзным препятствием.
Хорошим вариантом является выполнение регулировки оборотов посредством использования тахогенератора. Его обычно устанавливают на заводе. При отклонениях в скорости вращения мотора, через симисторы в мотор передаётся уже откорректированное электропитание, соответствующее требуемой скорости вращения. Если в эту схему встроить регулировку вращения мотора, то потери мощности здесь происходить не будет.
Как это выглядит конструктивно? Наиболее распространены реостатная регулировка вращения, и сделанная на основе использования полупроводников.
В первом случае, речь идёт о переменном сопротивлении с механической регулировкой. Она последовательно подключается к коллекторному электродвигателю. Недостатком является дополнительное выделение тепла и дополнительная трата ресурса аккумулятора. При таком способе регулировк, происходит потеря мощности вращения мотора. Является дешёвым решением. Не применяется для достаточно мощных моторов по упомянутым причинам.
Во втором случае, при использовании полупроводников, происходит управление мотором путём подачи определённых импульсов. Схема может менять длительность таких импульсов, что в свою очередь, меняет скорость вращения без потери мощности.
Как изготовить своими руками?
Существуют различные варианты схем регулировки. Приведём один из них более подробно.
Вот схема его работы:

Первоначально, это устройство было разработана для регулировки коллекторного двигателя на электротранспорте. Речь шла о таком, где напряжение питания составляет 24 В, но эта конструкция применима и для других двигателей.
Слабым местом схемы, которое было определено при испытаниях её работы, является плохая пригодность при очень больших значениях силы тока. Это связано с некоторым замедлением работы транзисторных элементов схемы.
Рекомендуется, чтобы ток составлял не более 70 А. В этой схеме нет защиты по току и по температуре, поэтому рекомендуется встроить амперметр и контролировать силу тока визуально. Частота коммутации составит 5 кГц, она определяется конденсатором C2 ёмкостью 20 нф.
При изменении силы тока, эта частота может изменяться между 3 кГц и 5 кГц. Переменный резистор R2 служит для регулировки тока. При использовании электродвигателя в бытовых условиях, рекомендуется использовать регулятор стандартного типа.
При этом, рекомендуется подобрать величину R1 таким образом, чтобы правильно настроить работу регулятора. С выхода микросхемы, управляющий импульс поступает на двухтактный усилитель на транзисторах КТ815 и КТ816, далее идёт уже на транзисторы.
Печатная плата имеет размер 50 на 50 мм и изготавливается из одностороннего стеклотекстолита:

На этой схеме дополнительно указаны 2 резистора по 45 ом. Это сделано для возможного подключения обычного компьютерного вентилятора для охлаждения прибора. При использовании в качестве нагрузки электродвигателя, необходимо схему заблокировать блокирующим (демпферным) диодом, который по своим характеристикам соответствует удвоенному значению тока нагрузки и удвоенному значению питающего напряжения.
Работа устройства при отсутствии такого диода может привести к поломке вследствие возможного перегрева. При этом, диод нужно будет поместить на теплоотвод. Для этого, можно воспользоваться металлической пластиной, которая имеет площадь 30 см2.
Регулирующие ключи работают так, что потери мощности на них достаточно малы. В оригинальной схеме, был использован стандартный компьютерный вентилятор. Для его подключения использовалось ограничительное сопротивление 100 Ом и напряжение питания 24 В.
Собранное устройство выглядит следующим образом:


При изготовлении силового блока (на нижнем рисунке), провода должны быть присоединены таким образом, чтобы было минимум изгибов тех проводников по которым проходят большие токи.Мы видим, что изготовление такого прибора требует определённых профессиональных знаний и навыков. Возможно, в некоторых случаях имеет смысл воспользоваться покупным устройством.
Критерии выбора и соимость
Для того, чтобы правильно выбрать наиболее подходящий тип регулятора, нужно хорошо представлять себе, какие есть разновидности таких устройств:
- Различные типы управления. Может быть векторная или скалярная система управления. Первые применяются чаще, а вторые считаются более надёжными.
- Мощность регулятора должна соответствовать максимально возможной мощности мотора.
- По напряжению удобно выбирать устройство, имеющее наиболее универсальные свойства.
- Характеристики по частоте. Регулятор, который вам подходит, должен соответствовать наиболее высокой частоте, которую использует мотор.
- Другие характеристики. Здесь речь идёт о величине гарантийного срока, размерах и других характеристиках.
В зависимости от назначения и потребительских свойств, цены на регуляторы могут существенно различаться.
Большей частью они находятся в диапазоне примерно от 3,5 тысяч рублей до 9 тысяч:
- Регулятор оборотов KA-18 ESC, предназначенный для моделей масштаба 1:10. Стоит 6890 рублей.
- Регулятор оборотов MEGA коллекторный (влагозащищенный). Стоит 3605 рублей.
- Регулятор оборотов для моделей LaTrax 1:18. Его цена 5690 рублей.
![]() Загрузка…
Загрузка…