Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.
Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора
Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре
Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.
Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.
Рис. 5. Схема частотного электропривода
Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Изменение оборотов асинхронного двигателя. Разбор способов регулирования.
Благодаря своей простоте исполнения, относительной дешевизне и надежности трехфазные двигатели широко используются в хозяйстве и производстве. Во многих исполнительных механизмах применяют всевозможные типы асинхронных двигателей . Для широкого спектра применения АД, необходимо изменять и регулировать скорость вращения вала двигателя. Регулировка скорости АД производят несколькими способами. Их мы сейчас и рассмотрим.
- Механические регулирование. Путем изменения передаточного числа в редукторах.
- Электрическое регулирование. Изменением нескольких параметров питающего напряжения.
Рассмотрим электрическое изменение скорости АД, как более точный и распространённый способ регулирования.
Управление электрическими параметрами позволяет производить плавный запуск двигателя, поддерживать заданные параметры скорости или момента асинхронного мотора.
Параметры с помощью которых управляют мотором:
- Частотой тока питающей сети.
- Величиной тока в цепях мотора.
- Напряжением на двигателе.
Самым распространённым асинхронным двигателем является мотор беличье колесо, двигатель с короткозамкнутым ротором. Для управления вращением, в этом типе электрических машин, применяют несколько видов воздействия.
- Изменение частоты поля статора.
- Управление величиной скольжения, изменяя напряжение питания.
Принцип работы однофазной асинхронной машины
В основе работы асинхронного двигателя лежит взаимодействие вращающегося магнитного поля статора и токов, наводимых им в роторе двигателя. При разности частоты вращения пульсирующих магнитных полей возникает вращающий момент. Именно этим принципом руководствуются при регулировании скорости вращения асинхронного двигателя с помощью частотного преобразователя.
Электродвигатель по факту может считаться двухфазным, но у него только одна рабочая обмотка статора, вторая, расположенная относительно главной под углом в 90о является пусковой.
Пусковая обмотка занимает в конструкции статора 1/3 пазов, на главную обмотку приходится 23 паза статора.
Ротор однофазного двигателя коротко замкнутый, помещенный в неподвижное магнитное поле статора, начинает вращаться.

Рис.№1 Схематический рисунок двигателя, демонстрирующий принцип работы однофазного асинхронного двигателя.
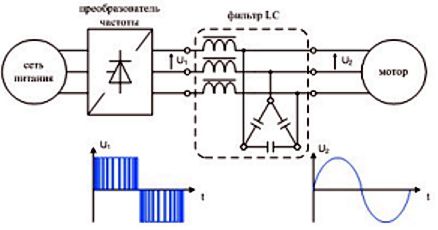
Регулирование частотой
Специальные устройства, преобразователи частоты (другие названия инвертор, частотник, драйвер), подключаются к электрической машине. Путем выпрямления напряжения питания, преобразователь частоты внутри себя формирует необходимые величины частоты и напряжения, и подает их на электрический двигатель.
Необходимые параметры для управления АД преобразователь рассчитывает самостоятельно, согласно внутренним алгоритмам, запрограммированным производителем устройства.
Преимущества регулирование частотой
.
- Достигается плавное регулирование частоты вращения электромотора.
- Изменение скорости и направление вращения двигателя.
- Автоматическое поддержание требуемых параметров.
- Экономичность системы управления.
Единственный недостаток, с которым можно смирится, это необходимость в приобретении частотника. Цены на такие устройства совсем незаоблачные, и в пределах 150 уе, можно обзавестись преобразователем для 2 кВт двигателя.
Принцип работы регулятора оборотов
Регулятор оборотов представляет собой устройство, состоящее из следующих трех основных подсистем:
- Двигателя переменного тока;
- Главного контроллера привода;
- Привода и дополнительных деталей.
Когда двигатель переменного тока запускается на полную мощность, происходит передача тока с полной мощностью нагрузки, такое повторяется 7-8 раз. Этот ток сгибает обмотки двигателя и вырабатывает тепло, которое будет выделяться продолжительное время. Это может значительно снизить долговечность двигателя. Иными словами, преобразователь – это своеобразный ступенчатый инвертор, который обеспечивает двойное преобразование энергии.

В зависимости от входящего напряжения, частотный регулятор числа оборотов трехфазного или однофазного электродвигателя, происходит выпрямление тока 220 или 380 вольт. Это действие осуществляется при помощи выпрямляющего диода, который расположен на входе энергии. Далее ток проходит фильтрацию при помощи конденсаторов. Далее формируется ШИМ, за это отвечает электросхема. Теперь обмотки асинхронного электродвигателя готовы к передаче импульсного сигнала и их интеграции к нужной синусоиде. Даже у микроэлектродвигателя эти сигналы выдаются, в прямом смысле слова, пачками.
Как выбрать регулятор
Существует несколько характеристик, по которым нужно выбирать регулятор оборотов для автомобиля, станочного электродвигателя, бытовых нужд:
- Тип управления. Для коллекторного электродвигателя бывают регуляторы с векторной или скалярной системой управления. Первые чаще применяются, но вторые считаются более надежными;
- Мощность. Это один из самых важных факторов для выбора электрического преобразователя частот. Нужно подбирать частотник с мощностью, которая соответствует максимально допустимой на предохраняемом приборе. Но для низковольтного двигатель лучше подобрать регулятор мощнее, чем допустимая величина Ватт;
- Напряжение. Естественно, здесь все индивидуально, но по возможности нужно купить регулятор оборотов для электродвигателя, у которого принципиальная схема имеет широкий диапазон допустимых напряжений;
- Диапазон частот. Преобразование частоты – это основная задача данного прибора, поэтому старайтесь выбрать модель, которая будет максимально соответствовать Вашим потребностям. Скажем, для ручного фрезера будет достаточно 1000 Герц;
- По прочим характеристикам. Это срок гарантии, количество входов, размер (для настольных станков и ручных инструментов есть специальная приставка).
Хорошо себя зарекомендовали приборы марки Sinus, E-Sky и Pic.
При этом также нужно понимать, что есть так называемый универсальный регулятор вращения. Это частотный преобразователь для бесколлекторных двигателей.

В данной схеме есть две части – одна логическая, где на микросхеме расположен микроконтроллер, а вторая – силовая. В основном такая электрическая схема используется для мощного электрического двигателя.
Видео: регулятор оборотов электродвигателя с ШИро V2
Асинхронные двигатели с фазным ротором
Основной способ управления АД с фазным ротором — изменение величины скольжения между статором и ротором.
Регулирование с помощью напряжения
Через специальные автотрансформаторы ЛАТР, путем изменения напряжения на обмотках двигателя, производят регулировку оборотов вала.
Данный способ так же подходит и к АД с короткозамкнутым ротором.
Таким способ можно регулировать в пределах от минимума до номинальных параметров двигателя.
Установка активного сопротивления в цепи ротора
Переменное реостатное сопротивление или набор сопротивлений в цепи ротора воздействует на ток и поле ротора. Изменяя таким образом величину скольжения и количество оборотов двигателя.
Чем больше сопротивление, тем меньше ток, тем больше величина скольжения АД и меньше скорость.
Достоинства такого регулирования.
- Большой диапазон регулирования оборотами электрической машины.
- Мягкая выходная характеристика мотора.
Недостатки такого способа.
- Уменьшение КПД двигателя.
- Ухудшение рабочих характеристик механизма.
Эпилог
При всех своих достоинствах асинхронные машины имеют существенный недостаток, это рывок ротора при подаче напряжения. Такие режимы опасны как для самого двигателя, так и для приводных механизмов. Поскольку во время пуска АД, ток в обмотках двигателя приравнивается к короткому замыканию. А рывок вала разбивает подшипники, шлицы, передаточные устройства. Поэтому пуск АД стараются производить плавным стартом. А именно:
- Запуск через ЛАТР.
- Разгон и работа АД, через переключение обмоток двигателя звезда-треугольник.
- Использование устройств управления, таких как частотный преобразователь.
Источник
Зачем нужен регулятор оборотов
Регулятор оборотов двигателя, частотный преобразователь – это прибор на мощном транзисторе, который необходим для того, чтобы инвертировать напряжение, а также обеспечить плавную остановку и пуск асинхронного двигателя при помощи ШИМ. ШИМ – широко-импульсное управление электрическими приспособлениями. Его применяют для создания определенной синусоиды переменного и постоянного тока.
Фото — мощный регулятор для асинхронного двигателя
Самый простой пример преобразователя – это обычный стабилизатор напряжения. Но у обсуждаемого прибора гораздо больший спектр работы и мощность.
Частотные преобразователи используются в любом устройстве, которое питается от электрической энергии. Регуляторы обеспечивают чрезвычайно точный электрический моторный контроль, так что скорость двигателя можно изменять в меньшую или большую сторону, поддерживать обороты на нужном уровне и защищать приборы от резких оборотов. При этом электродвигателем используется только энергия, необходимая для работы, вместо того, чтобы запускать его на полной мощности.
Как можно регулировать обороты асинхронного двигателя: обзор способов
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Регулятор частоты вращения трехфазных асинхронных электродвигателей
Новополоцк Витебской обл., Белоруссия
В домашних «мастерских» радиолюбителей встречаются электромеханические станки и различные приспособления с приводом от трехфазных асинхронных двигателей. Однако в быту трехфазная сеть нередко отсутствует, поэтому для их питания часто применяют фазосдвигающий конденсатор. К сожалению, это приводит к снижению необходимом мощности на валу электродвигателя, и к тому же исключается возможность регулирования частоты вращения. Используя предлагаемое устройство, можно не только питать трехфазный асинхронный электродвигатель от однофазном сети, но и плавно регулировать частоту его вращения.
Регулятор частоты вращения существенно улучшает характеристики трехфазного асинхронного двигателя (ТАД). Описываемое устройство позволяет питать ТАД от однофазной сети практически без потери мощности, регулировать пусковой момент, регулировать в широких пределах частоту вращения как на холостом ходу, так и при нагрузке, а также главное — увеличивать максимальную частоту вращения больше номинальной. Предлагаемое устройство эксплуатируется с ТАД мощностью 120 Вт и номинальной частотой вращения 3000 об/мин. Как известно, существует несколько способов регулирования частоты вращения ТАД — изменением питающего напряжения, нагрузки на валу, применением специальной обмотки ротора с регулируемым сопротивлением. Однако, наиболее эффективным является частотное регулирование, поскольку оно позволяет сохранить энергетические характеристики и применить наиболее дешевые и надежные электродвигатели с короткозамкнутой обмоткой ротора — «беличьей клеткой».

Схема регулятора приведена на рис. 1. На элементах DD1.1 — DD1.3 собран задающий генератор с изменяемой в пределах 30..800 Гц частотой. Регулируют частоту переменным резистором R3. Счетчик DD2, элемент И-НЕ DD1.4 и четыре элемента Исключающее ИЛИ DD3.1 — DD3.4 входят в состав формирователя импульсов трехфазной последовательности (ФИТ), который преобразует постоянное напряжение в сигналы прямоугольной формы, сдвинутые по фазе на 120 град. На рис. 2 приведены эпюры напряжения в характерных точках. На транзисторах 1VТ1 — 1VТ6, 2VТ1 —2VТ6, ЗVТ1 —ЗVТ6 собраны три одинаковых усилителя, по одному на каждую фазу ТАД. На рис. 1 приведена схема только одного усилителя. Схемы остальных точно такие же. Рассмотрим работу одного из них (верхнего по схеме). Когда на выходе элемента DD3.2 появляется высокий уровень, открывается составной транзистор 1VТ4, 1VТ5, а выходной транзистор 1VТ6 закрывается. Кроме того, высокий уровень поступает на вход транзисторной оптопары 1U1. в результате чего на ее выходе устанавливается низкий уровень, который закрывает составной транзистор 1VТ1. 1VТ2. Выходной транзистор 1VТЗ открыт. Для развязки по напряжению транзисторы 1VТ1, 1VТ2 и 1VТ4. 1VТ5 питают от разных источников напряжением +10 В, а транзисторы 1VТЗ, 1VТ6 — от источника напряжением +300 В. Диоды 1VD3, 1VD4, 1VD6, 1VD7 служат для более надежного закрывания выходных транзисторов. Одно из главных условий нормальной работы транзисторов 1VТЗ и 1VТ6 — они не должны быть одновременно открыты. Для этого на вход составного транзистора 1VТ1, 1VТ2 управляющее напряжение поступает с выхода оптопары 1U1, что обеспечивает некоторую задержку его переключения (приблизительно 40 мкс). При появлении на входе оптопары высокого уровня начинает заряжаться конденсатор 1С2. Сигнал низкого уровня на входе оптопары не может мгновенно закрыть составной транзистор 1VТ4, 1VТ5, поскольку конденсатор 1С2, разряжаясь по цепи 1RЗ, эмиттерные переходы транзисторов, поддерживает его в течение около 140 мкс в открытом состоянии, а транзистор 1VТ6 — в закрытом. Время выключения оптопары составляет примерно 100 мкс, поэтому транзистор 1VТЗ закрывается раньше, чем транзистор 1VТ6 открывается. Диоды 1VD5, 1VD8 защищают выходные транзисторы от повышения напряжения при коммутации индуктивной нагрузки — обмоток ТАД, а также замыкают ток обмоток, когда напряжение на них изменяет свою полярность (при переключении транзисторов 1VTЗ, 1VТ6). Например, после закрывания транзисторов 1VТЗ и 2VТ6 ток некоторое время проходит в прежнем направлении — от фазы А к фазе В, замыкаясь через диод 2VD5. источник питания, диод 1VD8, пока не уменьшится до нуля. Рассмотрим последовательность переключения выходных транзисторов на примере фаз А и В. Когда транзисторы 1VТЗ и 2VТ6 открыты, ток протекает по цепи: источник +300 В, участок коллектор — эмиттер транзистора 1VТЗ, обмотки фазы А и фазы В, участок коллектор — эмиттер транзистора 2VТ6. Когда эти транзисторы закрываются, а 1VТ6 и 2VТЗ открываются, ток протекает в противоположном направлении. Таким образом, на фазы А, В и С подаются импульсы напряжения прямоугольной формы со сдвигом по фазе 120 град. (рис. 2). Частота питающего ТАД напряжения определяется частотой переключения этих транзисторов. Благодаря поочередному открыванию транзисторов ток последовательно проходит по обмоткам статора АВ-АС-ВС-ВА-СА-СВ-АВ, что и создает вращающееся магнитное поле. Описанная выше схема построения выходных ступеней — трехфазная мостовая [1 — 3]. Ее достоинство заключается в том, что в фазном токе отсутствуют третьи гармонические составляющие.

Блок питания регулятора вырабатывает напряжения +5, +1О и +300 В. Напряжение +5 В, вырабатываемое стабилизатором на стабилитроне VDЗ и транзисторе VТ1, используется для питания микросхем DD1 — DD3. Верхний по схеме составной транзистор каждого усилителя питается от отдельной обмотки сетевого трансформатора Т1 и отдельного мостового выпрямителя (1VD1, 2VD1, ЗVD1]. Нижний составной транзистор всех усилителей — от обмотки II и диодного моста VD2. Для питания выходных транзисторов применен мост VD1 и LС-фильтр С2L1СЗ. Емкость конденсаторов С2 и СЗ выбирают исходя из мощности ТAД. Она должна быть не менее 20 мкФ при индуктивности дросселя 0.1 Гн. В регуляторе можно применить постоянные резисторы МЛТ, ОМЛТ, ВС. Конденсатор С1 — любой, например, керамический К10-17-26, С2 — С5, 1С1, 2С1, ЗС1 — любые оксидные. Дроссель L1 — самодельный. Его наматывают на Ш-образном магнитопроводе площадью поперечного сечения 4 см2. Обмотка содержит 120 витков провода ПЭВ 0,35. Дроссель можно исключить, но при этом придется увеличить емкость конденсаторов С2 и СЗ до 50 мкФ. Оптопары 1U1, 2U1, ЗU1 можно использовать и другие, у которых время задержки включения не более 100 мкс, а напряжение изоляции не менее 400 В. Основное требование к транзисторам — высокий и примерно одинаковый у всех коэффициент передачи тока (не менее 50). Транзисторы КТ315А могут быть заменимы на транзисторы серий КТ315, КТ312, КТ3102 с любыми буквенными индексами, а транзисторы КТ817А (VT1, 1VТ2, 1VТ5, 2VТ2, 2VТ5, ЗVТ2, ЗVТ5) — на КТ817 или КТ815 с любыми буквенными индексами. Вместо транзисторов КТ858А можно применить любые мощные с допустимым напряжением коллектор — эмиттер не менее 350 В и коэффициентом передачи тока не менее 50. Их следует установить на теплоотводы площадью не менее 10 см’ каждый. Однако при использовании электродвигателей мощностью более 200 Вт потребуются теплоотводы с большей площадью. Если мощность ТАД превышает ЗОО Вт, вместо выпрямителя КЦ409А необходимо собрать мост из отдельных диодов, рассчитанных на обратное напряжение более 400 В и соответствующий ток. Диоды 1VD5, 1VD8 подойдут любые с допустимым прямым импульсным током не менее 5 А и обратным напряжением не менее 400 В, например, КД2268 или КД226Г. Трансформатор — любой мощностью не менее 15 Вт, имеющий четыре раздельные вторичные обмотки по 8…9 В каждая. При налаживании устройства сначала отключают напряжение +300 В и проверяют наличие всех сигналов в соответствии с рис. 2. Если необходимо, подборкой конденсатора С1 или резистора R2 добиваются изменения частоты на коллекторе транзистора 1VТ2 (1VТ5) в пределах 5…130 Гц. Затем при отключенном ТАД вместо +300 В подают от внешнего источника напряжение +100…150 В, замыкают коллектор и эмиттер транзистора 1VТ2, коллектор и эмиттер транзистора 1VТ5 (чтобы закрыть транзисторы 1VТЗ и 1VТ6) и измеряют ток в цепи коллектора транзистора 1VТЗ, который должен быть не более нескольких миллиампер — ток утечки выходных транзисторов. Далее размыкают коллекторы и эмиттеры вышеуказанных транзисторов и устанавливают резистором R2 максимальную частоту. Подбором конденсатора 1С2 (в сторону увеличения емкости] добиваются минимального значения тока в цепи коллектора транзистора 1VТЗ. Аналогично налаживают и остальные усилители. После этого подключают к выходу регулятора электродвигатели, обмотки которого соединены звездой. Вместо +300 В подают от внешнего источника напряжение в пределах +100…150 В. Ротор электродвигатели должен начать вращаться. Когда необходимо изменить направление вращения, меняют местами любые две Фазы ТАД. Если выходные транзисторы работают в правильном режиме, они остаются длительное время чуть теплыми, в противном случае подбирают сопротивление резисторов 1R6, 1R8. 2R6, 2R8, 3R6, ЗR8.
Литература
1. Радин В. И. Электрические машины: Асинхронные машины. — М.: Высшая школа 1988 2. Краачик А. Э. Выбор и применение асинхронных двигателей. — М.: Энерго-атомиздат, 1987. 3. Лопухина Е. М. Асинхронные исполнительные микродвигатели для систем автоматики. — М.: Высшая школа, 1988.
Статья из журнала Радио 2001 № 4
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.

- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.

Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.

- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.

Управление скоростью вращения однофазных двигателей
Существует несколько способов регулирования скорости вращения однофазного двигателя.
- Управление скольжением двигателя или изменением напряжения. Способ актуален для агрегатов с вентиляторной нагрузкой, для него рекомендуется использовать двигатели с повышенной мощностью. Недостаток способа – нагрев обмоток двигателя.
- Ступенчатое регулирование скорости вращения двигателя с помощью автотрансформатора.
Рис.№2. Схема регулировки с помощью автотрансформатора.
Достоинства схемы – напряжение выхода имеет чистую синусоиду. Способность трансформатора к перегрузкам имеет большой запас по мощности.
Недостатки – автотрансформатор имеет большие габаритные размеры.
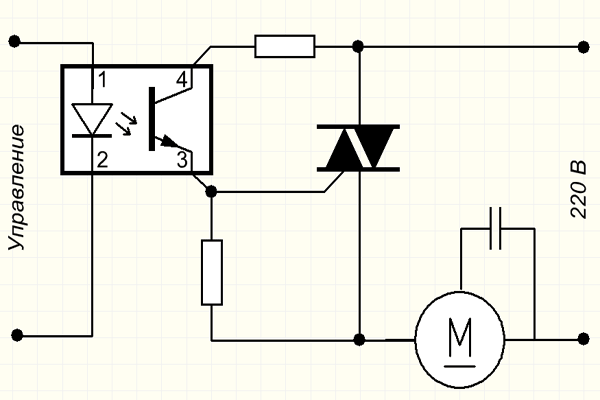
Использование тиристорного регулятора оборотов двигателя. Применяются тиристорные ключи, подключенные встречно-параллельно.
Рис. №3.Схема тиристорного регулирования однофазного асинхронного электродвигателя.
При использовании для регулирования скорости вращения однофазных асинхронных двигателей, чтобы избежать негативного влияния индукционной нагрузки производят модификацию схемы. Добавляют LRC-цепи для защиты силовых ключей, для корректировки волны напряжения используют конденсатор, минимальная мощность двигателя ограничивается, так гарантируется старт двигателя. Тиристор должен иметь ток выше тока электродвигателя.
Транзисторный регулятор напряжения
В схеме используется широтно-импульсная модуляция (ШИМ) с применением выходного каскада, построенного на использовании полевых или биполярных IGBT транзисторах.

Рис. №4. Схема использования ШИМ для регулирования однофазного асинхронного электродвигателя.
Частотное регулирование асинхронного однофазного электродвигателя считается основным способом регулирования частоты электродвигателя, мощности, эффективности использования, скорости и показателей энергосбережения.

Рис. №5. Схема управления электродвигателем без исключения из конструкции конденсатора.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Содержание
- Частотное регулирование
- Схемы регуляторов оборотов асинхронного двигателя
- Заключение
Асинхронные двигатели переменного тока являются самыми применяемыми электродвигателями абсолютно во всех хозяйственных сферах. В их преимуществах отмечается конструктивная простота и небольшая цена. При этом немаловажное значение имеет регулирование скорости асинхронного двигателя. Существующие способы показаны ниже.
Согласно структурной схеме скоростью электродвигателя можно управлять в двух направлениях, то есть изменением величин:
- скорость электромагнитного поля статора;
- скольжение двигателя.
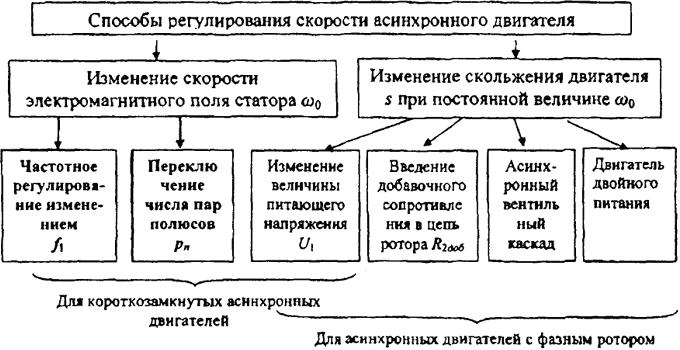
Первый вариант коррекции, используемый для моделей с короткозамкнутым ротором, осуществляется за счет изменения:
- частоты,
- количества полюсных пар,
- напряжения.
В основе второго варианта, применяемого для модификации с фазным ротором, лежат:
- изменение напряжения питания;
- присоединение элемента сопротивления в цепь ротора;
- использование вентильного каскада;
- применение двойного питания.
Вследствие развития силовой преобразовательной техники на текущий момент в широком масштабе изготовляются всевозможные виды частотников, что определило активное применение частотно-регулируемого привода. Рассмотрим наиболее распространённые методы.
Частотное регулирование
Всего десять лет назад в торговой сети регуляторов частоты вращения скорости ЭД было небольшое количество. Причиной тому служило то, что тогда ещё не производились дешёвые силовые высоковольтные транзисторы и модули.
На сегодня частотное преобразование – самый распространённый способ регулирования скорости двигателей. Трёхфазные преобразователи частоты создаются для управления 3-фазными электродвигателями.
Однофазные же двигатели управляются:
- специальными однофазными преобразователями частоты;
- 3-фазными преобразователями частоты с устранением конденсатора.
Схемы регуляторов оборотов асинхронного двигателя
Для двигателей повседневного предназначения легко можно выполнить необходимые расчеты, и своими руками произвести сборку устройства на полупроводниковой микросхеме. Пример схемы регулятора электродвигателя приведён ниже. Такая схема позволяет добиться контроля параметров приводной системы, затрат на техническое обслуживание, снижения потребления электричества наполовину.
Принципиальная схема регулятора оборотов вращения ЭД для повседневных нужд значительно упрощается, если применить так называемый симистор.
Обороты вращения ЭД регулируются с помощью потенциометра, определяющего фазу входного импульсного сигнала, открывающего симистор. На изображении видно, что в качестве ключей применяются два тиристора, подключённых встречно-параллельно. Тиристорный регулятор оборотов ЭД 220 В достаточно часто применяется для регулирования такой нагрузки, как диммеры, вентиляторы и нагревательная техника. От оборотов вращения асинхронного ЭД зависят технические показатели и эффективность работы двигательного оборудования.
Заключение
На технорынке сегодня предлагаются в большом ассортименте регуляторы и частотные преобразователи для асинхронных электродвигателей переменного тока.
Управление способом варьирования частоты на данный момент – самый оптимальный способ, т. к. он позволяет плавно регулировать скорость асинхронного ЭД в широчайшем диапазоне, без значительных потерь и снижения перегрузочных способностей.
Тем не менее, на основе расчёта, можно самостоятельно собрать простое и эффективное устройство с регулированием оборотов вращения однофазных электродвигателей с помощью тиристоров.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».

Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.

Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
- Однофазные.
- Трехфазные.
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.

Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц; р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:

- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
где 2p – число полюсов; Z1 – количество пазов в сердечнике статора; y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:
- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов; Z1 – количество пазов в статоре; b – ширина зубца, см; h – высота спинки, см; Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором;
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.

Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:

Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.

Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.

Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Способы регулирования
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Выбираем устройство
Для того чтобы подобрать эффективный регулятор необходимо учитывать характеристики прибора, особенности назначения.
- Для коллекторных электродвигателей распространены векторные контроллеры, но скалярные являются надёжнее.
- Важным критерием выбора является мощность. Она должна соответствовать допустимой на используемом агрегате. А лучше превышать для безопасной работы системы.
- Напряжение должно быть в допустимых широких диапазонах.
- Основное предназначение регулятора преобразовывать частоту, поэтому данный аспект необходимо выбрать соответственно техническим требованиям.
- Ещё необходимо обратить внимание на срок службы, размеры, количество входов.
Прибор триак
Устройство симистр (триак) используется для регулирования освещением, мощностью нагревательных элементов, скоростью вращения.

С помощью преобразователя регулируется мощность методом изменения времени открытого симистора. Если он закрыт, конденсатор заряжается посредством нагрузки и резисторов. Один резистор контролирует величину тока, а второй регулирует скорость заряда.
Когда конденсатор достигает предельного порога напряжения 12в или 24в, срабатывает ключ. Симистр переходит в открытое состояние. При переходе напряжения сети через ноль, симистр запирается, далее конденсатор даёт отрицательный заряд.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением

Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.

Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.

Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).

Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Виды и устройство регуляторов оборотов коллекторных двигателей
Коллекторные двигатели часто можно встретить в бытовых электроприборах и в электроинструменте: стиральная машина, болгарка, дрель, пылесос и т. д. Что совсем не удивительно, ведь коллекторные двигатели позволяют получать и высокие обороты, и большой крутящий момент (в том числе высокий пусковой момент) — что и нужно для большинства электроинструментов.
При этом коллекторные двигатели могут питаться как постоянным током (в частности — выпрямленным), так и переменным током от бытовой сети. Для управления скоростью вращения ротора коллекторного двигателя применяют регуляторы оборотов, о них и пойдет речь в данной статье.

Для начала вспомним устройство и принцип работы коллекторного двигателя. Коллекторный двигатель включает в себя обязательно следующие части: ротор, статор и щеточно-коллекторный коммутационный узел. Когда питание подается на статор и на ротор, их магнитные поля начинают взаимодействовать, ротор начинает в итоге вращаться.
Питание на ротор подается через графитовые щетки, плотно прилегающие к коллектору (к ламелям коллектора). Для изменения направления вращения ротора, необходимо изменить фазировку напряжения на статоре или на роторе.

Обмотки ротора и статора могут питаться от разных источников или же могут быть соединены параллельно либо последовательно друг с другом. Так различаются коллекторные двигатели параллельного и последовательного возбуждения. Именно коллекторные двигатели последовательного возбуждения можно встретить в большинстве бытовых электроприборов, поскольку такое включение позволяет получить устойчивый к перегрузкам двигатель.
Говоря о регуляторах оборотов, прежде всего остановимся на самой простой тиристорной (симисторной) схеме (смотрите ниже). Данное решение применяется в пылесосах, стиральных машинах, болгарках, и показывает высокую надежность при работе в цепях переменного тока (особенно от бытовой сети).
Работает данная схема достаточно незатейливо: на каждом периоде сетевого напряжения конденсатор заряжается через резистор до напряжения отпирания динистора, присоединенного к управляющему электроду основного ключа (симистора), после чего симистор открывается и пропускает ток к нагрузке (к коллекторному двигателю).

Регулируя время зарядки конденсатора в цепи управления открыванием симистора, регулируют среднюю мощность подаваемую на двигатель, соответственно регулируют обороты. Это простейший регулятор без обратной связи по току.
Симисторная схема похожа на обычный диммер для регулировки яркости ламп накаливания, обратной связи в ней нет. Чтобы появилась обратная связь по току, например чтобы удерживать приемлемую мощность и не допускать перегрузок, необходима дополнительная электроника. Но если рассмотреть варианты из простых и незатейлевых схем, то за симисторной схемой следует реостатная схема.
Реостатная схема позволяет эффективно регулировать обороты, но приводит к рассеиванию большого количества тепла. Здесь требуется радиатор и эффективный отвод тепла, а это потери энергии и низкий КПД в итоге.

Более эффективны схемы регуляторов на специальных схемах управления тиристором или хотя бы на интегральном таймере. Коммутация нагрузки (коллекторного двигателя) на переменном токе осуществляется силовым транзистором (или тиристором), который открывается и закрывается один или несколько раз в течение каждого периода сетевой синусоиды. Так регулируется средняя мощность, подаваемая на двигатель.
Схема управления питается от 12 вольт постоянного напряжения от собственного источника или от сети 220 вольт через гасящую цепь. Такие схемы подходят для управления мощными двигателями.

Принцип регулирования с микросхемами на постоянном токе — это конечно ШИМ — широтно-импульсная модуляция. Транзистор, например, открывается с строго заданной частотой в несколько килогрец, но длительность открытого состояния регулируется. Так, вращая ручку переменного резистора, устанавливают скорость вращения ротора коллекторного двигателя. Данный метод удобен для удержания малых оборотов коллекторного двигателя под нагрузкой.
Более качественное управление — именно регулировка по постоянному току. Когда ШИМ работает на частоте порядка 15 кГц, регулируя ширину импульсов, управляют напряжением при примерно одном и том же токе. Скажем, регулируя постоянное напряжение в диапазоне от 10 до 30 вольт, получают разные обороты при токе порядка 80 ампер, добиваясь требуемой средней мощности.

Если вы хотите изготовить простой регулятор для коллекторного двигателя своими руками без особых запросов к обратной связи, то можно выбрать схему на тиристоре. Потребуется лишь паяльник, конденсатор, динистор, тиристор, пара резисторов и провода.
Если же нужен более качественный регулятор с возможностью поддержания устойчивых оборотов при нагрузке динамического характера, присмотритесь к регуляторам на микросхемах с обратной связью, способным обрабатывать сигнал с тахогенератора (датчика скорости) коллекторного мотора, как это реализовано например в стиральных машинах.
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2

Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:

Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
Использование ЧП для трёхфазных двигателей

Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:

Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:

Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
Преимущества:
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
Недостатки метода:
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
В цепи якоря
Это лучший вариант регулирования скорости мотора с независимым возбуждением. Частота вращения прямо пропорциональна подводимому к якорю напряжению. Механические характеристики не меняют своего угла наклона, а перемещаются параллельно друг другу.
Для осуществления этой схемы нужно цепь якоря подключить к источнику напряжения, которое можно менять.
Это возможно в электрических машинах малой или средней мощности. Двигатель большой мощности целесообразно подключить в схему с генератором напряжения независимого возбуждения.

В качестве привода для генератора используют обычный трехфазный асинхронник. Чтобы уменьшить обороты, достаточно на якоре понизить напряжение. Оно меняется от номинального и вниз. Эта схема имеет название «двигатель-генератор». Таким образом можно менять параметры на двигателе 220в.
Для низкого напряжения
Управление агрегатами на 12в проще из-за более низкого напряжения и как следствие, более доступных деталей. Вариантов подобных схем множество, поэтому важно понять сам принцип.
Такой двигатель имеет ротор, щеточный механизм и магниты. На выходе у него всего два провода, контролирование скорости идет по ним. Питание может быть 12, 24, 36в, или другое. Что нужно – это его менять. Лучше, когда в пределах от нуля до максимума. В более простых вариантах 12–0в не получится, другие варианты дают такую возможность.
Кто-то паяет радиоэлементы навесным монтажом, кто-то набирает печатную плату – это уже зависит от желания и возможностей каждого человека.

Этот вариант подойдет, если точность неважна: например, вентилятор. Напряжение меняется от 0 до 12 вольт, пропорционально меняется крутящий момент.
Другой вариант – со стабилизацией оборотов независимо от нагрузки на валу.
![]()
Питание 12 вольт, схема очень проста. Двигатель набирает обороты плавно, и также плавно их сбавляет так как напряжение на выходе меняется в пределах 12–0в. Как результат – можно убрать крутящий момент практически до нуля. Если потенциометр крутить в обратном направлении, мотор так же постепенно набирает обороты до максимума. Микросхема очень распространенная, ее характеристики тоже подробно описаны. Питание 12–18в.
Есть еще один вариант, только это уже не для 12, а для 24в питания.

Двигатель постоянного тока, питание – переменное, так как стоит диодный мост. При желании можно мост выбросить и запитывать постоянкой от своего блока питания.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.

Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.

- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.

Регулирование скорости оборотов двигателя постоянного тока

С точки зрения регулирования скоростью вращения электродвигателей, интересно уравнение для электромеханических характеристик, соответствующее Второму закону Кирхгофа:
ω = U/C×Φ – ΥЯ /( C×Φ) 3 ×M
При описании технических характеристик электродвигателя скорость, выражаемая оборотами в минуту, зачастую называется частотой вращения ν по известному соотношению:
ω = 2p/T = 2pn
Поэтому эти две разноименные величины часто применяются в одном и том же смысле. Скорость w (частота ν) находится в прямой зависимости от напряжения питания U и в обратной от магнитного потока Ф. Исходя из приведенной выше формулы, возникает вывод, что скоростью можно управлять, регулируя сопротивление якоря, магнитный поток и напряжение питания.

Методы регулировки
Итак, различают три основных варианта регулирования скоростью:
- Изменением напряжения сети. Меняя подводимое питание можно управлять частотой вращения двигателя;
- Добавлением пускового реостата в цепь якоря. Регулируя сопротивление, можно уменьшить скорость вращения;
- Управлением магнитного потока. Двигатели с электромагнитами дают возможность регулировать поток путем изменения тока возбуждения. Однако нижний предел ν min ограничен насыщением магнитной цепи двигателя, что не позволяет увеличивать в большой степени магнитный поток.
Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
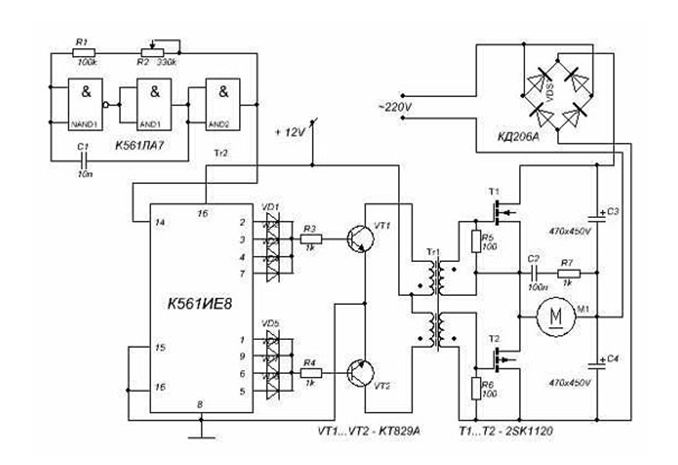
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.

Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2×12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.

Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.

Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.

Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.